
基于红外循迹的智能小车的设计
基于红外循迹的智能小车的设计(任务书,开题报告,外文翻译,论文14900字)
摘要
本设计给出了单片机作为核心的智能循迹避障小车的基本原理和实现方案。本系统通过将系统细化为模块化的方式进行了设计,通过超声波传感器、红外光电传感器以及驱动芯片组成了各个不同的模块,实现了小车智能循迹,智能避障的功能。本小车由于其自主性和智能性,可以被广泛应用于科技的各个领域,在一些危险的任务中可以代替人力并且有很好的表现。
关键词:智能 循迹 避障 单片机
The design of intelligent vehicle based on tracking
ABSTRACT
The design gives us the basic theory and the useful plan of the intelligent tracking and obstacle avoidance car which uses a single-chip microcomputer as the core. This system is divided into different module. By using ultrasonic sensors, infrared photoelectric sensor and driving chip consists of various modules. The functions of the car, like the intelligent tracking and intelligent obstacle avoidance, are implemented. Due to the car’s autonomy and intelligence, it can be used in many technological fields. The car can take the place of human and has very good performance in some dangerous tasks. [来源:http://www.doc163.com]
Keywords: intelligent; tracking; obstacle avoidance; microcomputer
[来源:http://Doc163.com]
目录
摘要 I
ABSTRACT II
第一章 绪论 3
1.1 引言 3
1.2 本论文主要任务 2
1.3 论文结构安排 3
第二章 智能小车基础理论知识了解 4
2.1 红外线的基本认识 4
2.2 超声波的基本认识 2
第三章 整体方案设计 3
3.1 整体方案设计的思路 3
3.1.1 避障 3
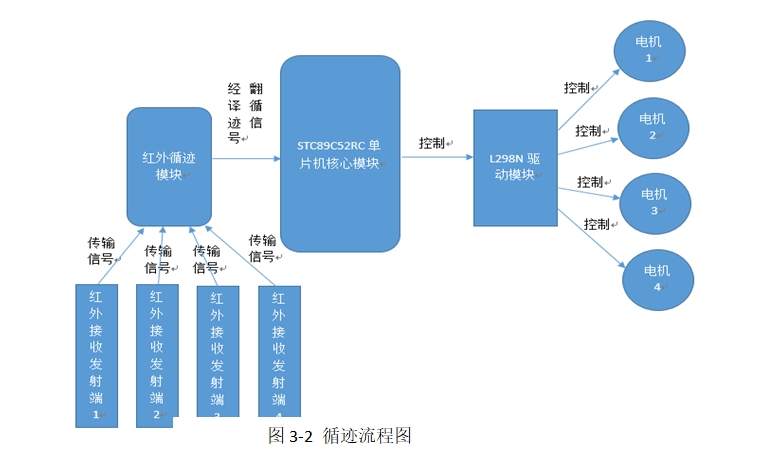
3.1.2红外循迹 3
[版权所有:http://DOC163.com]
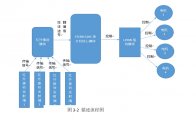
3.2 整体方案的流程图 6
3.3 方案设计与论证 7
3.3.1 核心模块 7
3.3.2 驱动模块 7
3.3.3 循迹模块 7
3.3.4 避障模块 8
第四章 主要器件介绍 9
4.1 STC89C52RC介绍 9
4.1.1 时钟电路 9
4.1.2 复位和复位电路 10
4.1.3 STC89C52RC各引脚功能 11
4.2 L298N驱动芯片 12
4.2.1 L298N引脚介绍 12
4.2.2 L298N运行参数 13
4.3 TCRT5000红外光电传感器 14
4.3.1 TCRT5000基本参数 14
4.3.2 TCRT5000性能关系图 15
4.4 HC-SR04超声波测距传感器 16
4.4.1 HC-SR04超声波测距传感器工作参数 16
第五章 硬件设计 18
5.1 STC89C52RC单片机控制电路 18
5.2 L298N驱动模块 18
5.3 红外循迹模块 20
5.4 超声波避障模块 22
5.5 小车整体组装 24
第六章 软件设计 26
6.1 红外循迹程序设计 26
6.1.1 端口定义 27
6.1.2 延时函数 27
6.1.3小车前进函数 27
6.1.4 主程序 28
6.2 超声波避障模块程序设计 29
6.2.1 延时函数 29
6.2.2 扫描数码管 29
6.2.3 启动测距信号 30
6.2.4 测距 30
6.3 调试 31
第七章 论文总结 32
7.1 小结 32
7.2 下一步工作 32
参考文献 34
附录源程序 35
致谢 47
[资料来源:https://www.doc163.com]