
部分自动驾驶五座电动轮车制动系统设计(含CAD图,CATIA三维图)
部分自动驾驶五座电动轮车制动系统设计(含CAD图,CATIA三维图)(任务书,开题报告,外文翻译,文献摘要,论文说明书12500字,CAD图纸7张,CATIA三维图)
摘要
本次毕业设计在原有车型骏派A70E的基础上,对制动系统做了一些改进,本次设计从制动效能和制动时方向稳定性的角度出发来进行设计。对于制动系统而言,本设计通过对制动系统的分析,选用了线控制动系统,后又对制动器部分进行了设计,包括了制动器的直径与厚度,制动衬片的一些参数,以及一些对液压制动回路的选型,后又对液压驱动机构的制动轮缸与ibooster进行了设计,包括直径的设计,以及一些性能的分析,最后对制动性能进行了分析,包括制动距离与制动减速度的计算以及一些仿真。由于本车型属于部分自动驾驶的车型,总体上借助一些传感器,把盘式制动器作为执行模块,便形成了AEB系统的雏形。本次毕业设计的主要任务还是传统制动器的设计。
关键词:制动系统;盘式制动器;制动轮缸;ibooster
Abstract
This graduation project is based on the original vehicle model,Junpai A70E.Some improvements have been made to the braking system.It is designed from the perspective of braking efficiency and braking stability in direction.For the brake system,through the analysis of the brake system,brake by wire system is chosen,and then the brake part is designed, including the diameter and thickness of the brake, some parameters of the brake lining,and some selection of the hydraulic brake circuit.Then the brake wheel cylinder and the ibooster of the hydraulic driving mechanism are designed.Including the design of diameter and some performance analysis.Finally,the braking performance is analyzed,including the calculation of braking distance and braking deceleration and some simulation.As this vehicle belongs to a part of the automatic driving model,in general,with the help of some sensors,disc brake as an executive module,they form the embryonic form of AEB system.The main task of this graduation project is the design of traditional brake.
[资料来源:Doc163.com]
Key Words:brake system;disc brake;brake master cylinder;ibooster
1.3 研究的基本内容
(1)分析部分自动驾驶五座电动轮车制动系统(含自动制动执行机构)及其部件的结构型式;
(2)确定部分自动驾驶五座电动轮车制动系统及其部件的结构设计方案;
(3)确定制动系统及其部件的技术参数;
(4)制动系统及其部件的设计计算分析;
(5)确定制动系统部件的具体结构尺寸参数;
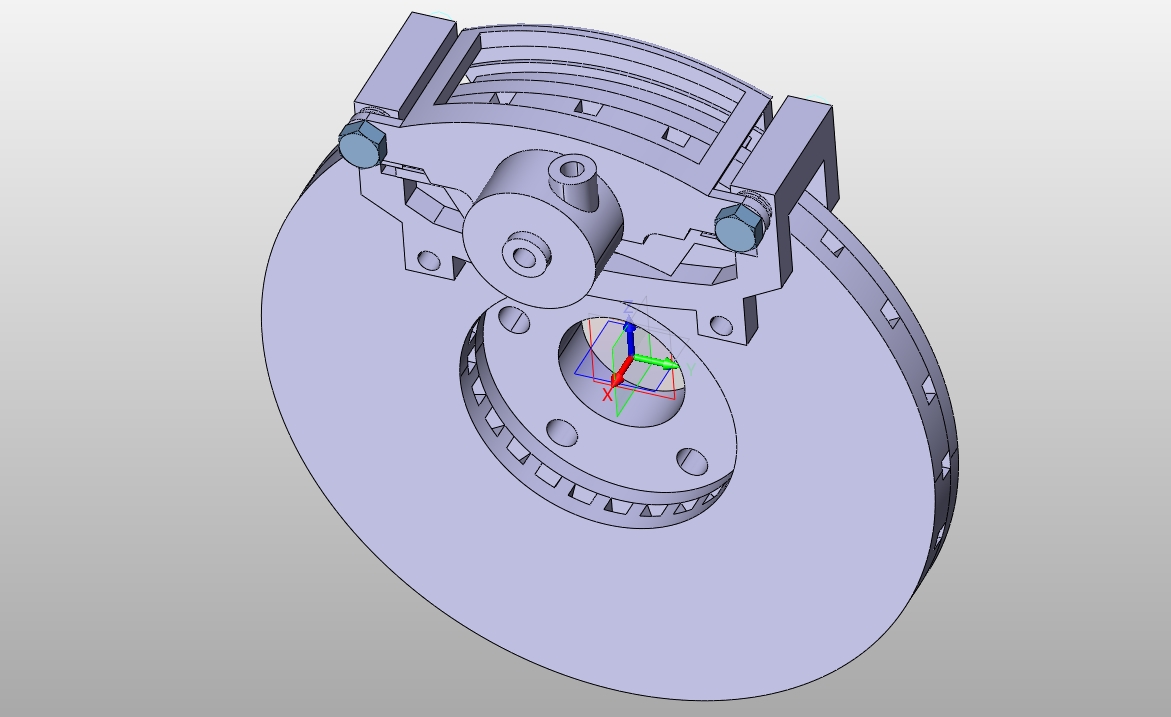
(6)绘制制动系结构图、制动器装配图、自动制动执行机构装配图和主要零部件图。
整车参数
尺寸参数 长/宽/高(mm) 4610/1790/1500
轴距(mm) 2652
轮距(前/后)(mm) 1530/1520
质量参数 整备质量(kg) 1450
满载总质量(kg) 1800
性能参数 最高车速(km/h) 140
最大爬坡度(%) 30 [资料来源:http://doc163.com]
续驶里程(km) >280(60km/h等速)
[资料来源:www.doc163.com]



 [资料来源:http://www.doc163.com]
[资料来源:http://www.doc163.com] 


[资料来源:http://www.doc163.com]
目录
摘要 I
Abstract II
第1章绪论 1
1.1 目的及意义 1
1.2 制动系统发展现状 1
1.3 研究的基本内容 2
第2章制动系统的分析和选择 4
2.1 制动器形式方案分析与选择 4
2.1.1 鼓式制动器 4
2.1.2 盘式制动器 6
2.2 制动系统形式方案分析与选择 7
2.3 液压分路系统形式的选择 8
2.4 液压制动主缸的设计方案 8
2.5 ABS系统和ESP系统的分析 8
2.6 ibooster以及其对应部分自动驾驶方面的介绍 9
第3章制动系统设计计算 11
3.1 制动系统的主要参数数值 11
3.1.1 相关主要参数 11
3.1.2 同步附着系数的分析 11
3.1.3 地面对前、后轮的法向反作用力 11
3.2 制动器有关计算 12 [来源:http://Doc163.com]
3.2.1 确定前后制动力分配系数β 12
3.2.2 制动器制动力矩的确定 13
3.2.3 盘式制动器主要参数的确定 14
3.2.4 盘式制动器的制动力的计算 14
3.3 制动器主要零部件的设计 14
3.4 驻车制动机构的设计 15
3.5 应急制动和驻车制动时制动力校核 16
第4章液压制动驱动机构的设计计算 17
4.1 制动轮缸直径d的设计计算 17
4.2 制动主缸直径的设计计算 17
4.3 制动踏板力和踏板行程的设计计算 17
第5章制动性能分析 19
5.1 制动性能评价指标 19
5.2 制动力分配分析 19
5.3 制动减速度和制动距离 22
5.4 制动衬块的磨损特性计算 25
第6章总结 26
参考文献 27
致谢 28
附录A 关于制动性能分析的MATLAB程序 29
[资料来源:https://www.doc163.com]
附录B 关于制动效率分析的MATLAB程序 32
下一篇:电动汽车(巡逻车)车架设计及其强度有限元分析(含CAD图,UG三维图)