
16t四连杆门机总体设计及起升机构的虚拟设计(含CAD图,Creo三维图)

16t四连杆门机总体设计及起升机构的虚拟设计(含CAD图,Creo三维图)(任务书,开题报告,论文说明书13200字,CAD图3张,Creo三维图)
摘要
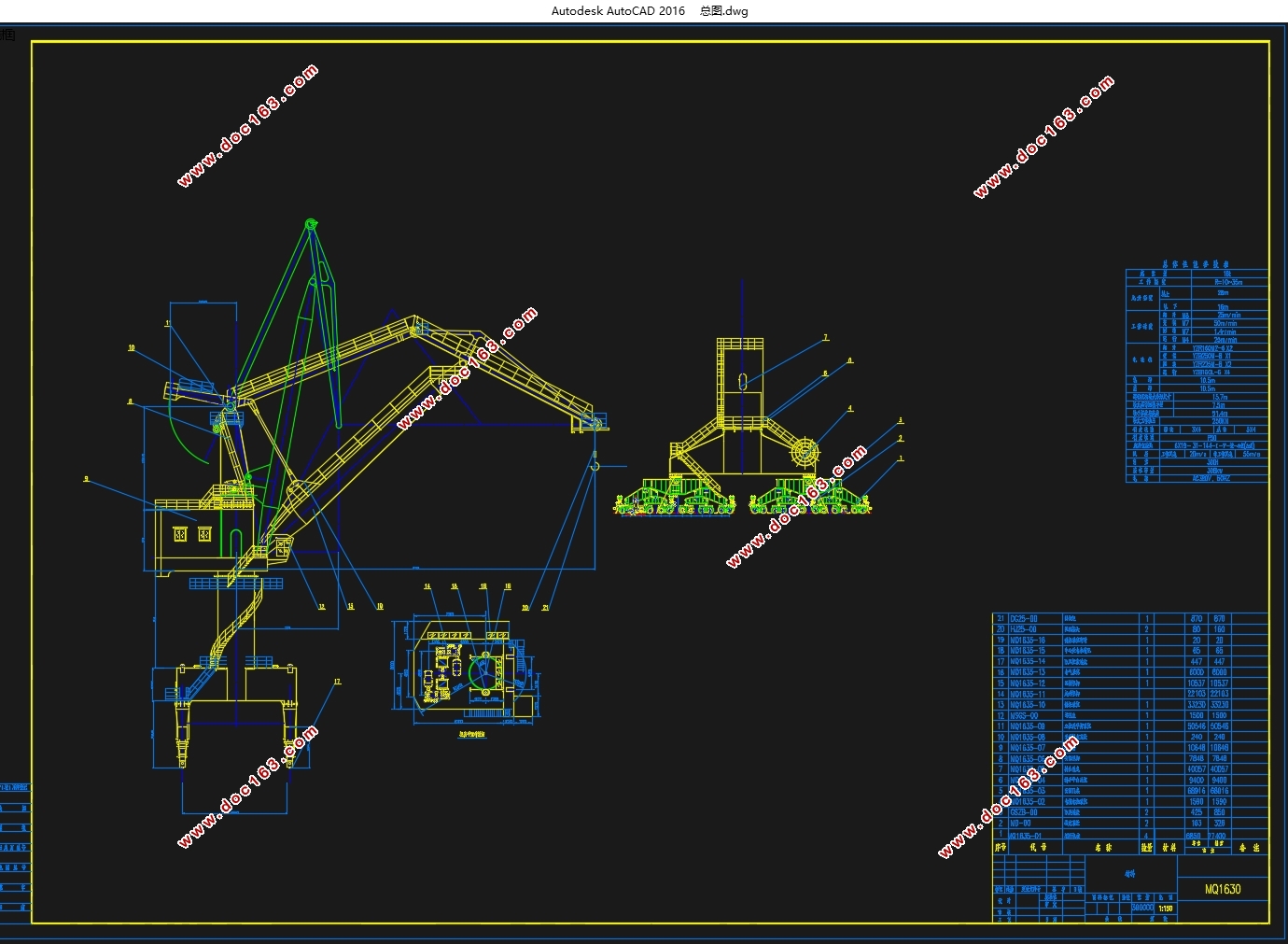
目前国内门座起重机设计大多采用参考以往设计成功的机型,并采用经验公式计算。针对起重机设计过程中存在的难点,本文以四连杆MQ1635门座起重机为例,首先参考以往机型完成门座起重机的总体设计,包括:确定门座起重机总体设计参数,货物水平位移系统设计,臂架自重平衡系统设计,起重机载荷计算,抗倾覆稳定性验算和轮压计算,然后完成起升机构的详细设计计算,并运用Creo参数化建模的优点,通过对起升机构的虚拟设计,对起升机构详细分析,从而改进起重机设计过程中包括尺寸冲突在内的缺陷,实现起升机构的优化设计。
本文旨在凸显虚拟设计在起重机等大型机器设计过程中所起的重要作用。在虚拟设计中,Creo可伸缩的可互操作的优点得到充分发挥,同时,Creo集成了2D CAD、3D CAD、参数化和直接建模创建、分析、查看等功能,在运用中给设计者带来了极大的方便。
关键词:门座起重机;总体设计;虚拟设计;Creo
Abstract
At present, most of the design of portal crane is based on the previous models, and the empirical formula is also used to design and calculate. Aiming at the difficulty in the design process of the crane, this paper takes the four link MQ1635 portal crane as an example, firstly, the overall design of the gantry crane is completed by referring to the previous models,including the determination of the overall design parameters of the portal crane, the design of the horizontal displacement system of the lifting goods, the design of the arm frame weight balance system, the calculation of the load of the crane, the calculation of the stability against overturning and the calculation of the wheel pressure.then finish the detailed design and calculation of the lifting mechanism, and the use of the advantages of Creo parametric, By means of virtual design ,hoisting mechanism are analyzed in detail, so as to avoid defect of the crane design process such as the size conflict, and realize the optimal design of the lifting mechanism.
[资料来源:https://www.doc163.com]
This paper aims to highlight the important role of virtual design in the design process of large machinery such as cranes.In the virtual design, Creo is inter-operable and retractable. At the same time, In addition to Parametric Creo, there are multiple independent applications in 2D and CAD 3D modeling, analysis and visualization.therefore,It brings great convenience to the designers.
Key Words: portal crane; overall design; Virtual design; creo parametric
2.1 性能参数表
起重机的技术参数充分表明了起重机的工作能力,相当于起重机的使用说明书,同时也是设计起重机的基本依据。本次设计的主要性能参数如表2.1所示。
表2.1 起重机设计主要性能参数表
项目名称 性能参数
起重量 16t
工作幅度 最大工作幅度 35
最小工作幅度 10
起升高度 轨上 28
轨下 16
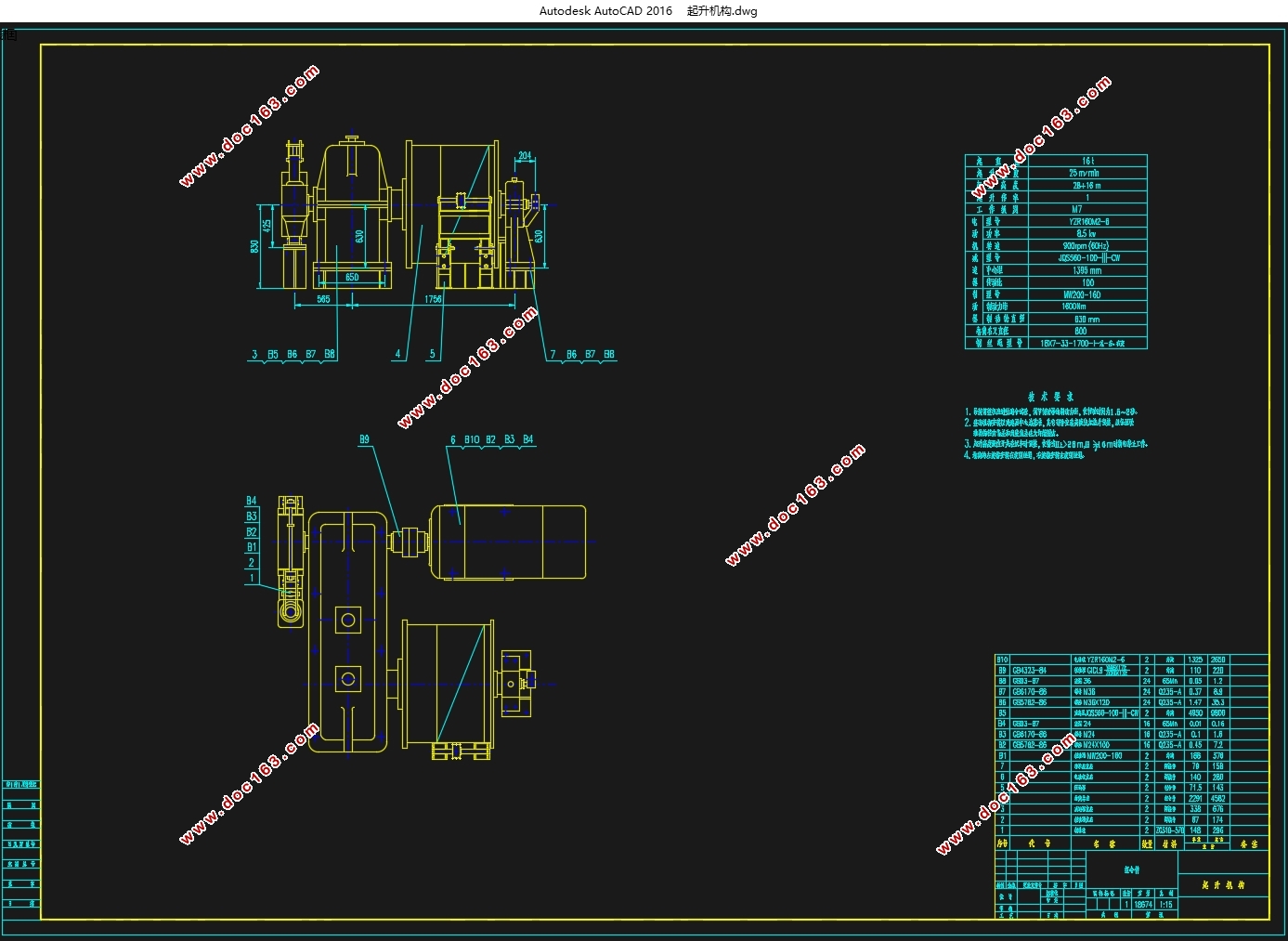
作业速度 起升机构 25m/min [来源:http://www.doc163.com]
变幅机构 45m/min
回转机构 1.2r/min
运行机构 25m/min
工作级别 整机 A7
起升机构 M8
变幅机构 M7
回转机构 M7
运行机构 M4
基距/轨距 10.5/10.5m
工作状态最大风速 20m/s
非工作状态最大风速 55m/s
许用轮压 250kN
轨道型号 P50
电源 380V/50Hz
[资料来源:http://www.doc163.com]
 [资料来源:http://doc163.com]
[资料来源:http://doc163.com] 

目录
第1章 绪论 1
1.1目的及意义(含国内外的研究现状分析) 1
第2章 总体设计计算 2
2.1 性能参数 2
2.2 确定主要工作机构和金属结构的形式 2
2.2.1 确定主要工作机构形式 3
2.2.2 确定金属结构的形式 7
2.3 确定组合式四连杆臂架结构尺寸 9
2.4 用作图法进行货物水平位移补偿系统设计 10
2.4.1 货物水平位移补偿系统原理 10
2.4.2 刚性四连杆组合臂架方案的作图法设计 10
2.5 杠杆活对重式臂架自重平衡系统设计 16
2.5.1 杠杆活对重平衡系统工作原理 16
2.5.2 臂架自重平衡系统设计方法 16
2.6 各工作机构、金属结构的计算工况、计算载荷以及载荷组合 19
2.6.1 计算载荷 19
2.6.2 载荷组合 22
2.7 整机稳定性校核 23
2.7.1 基本原则 23
2.7.2验算工况、载荷系数和载荷组合 24
2.8 轮压计算 26 [资料来源:http://www.doc163.com]
第3章 MQ1635起升机构的虚拟设计 31
3.1 起升机构的设计计算 31
3.1.1钢丝绳的选型 31
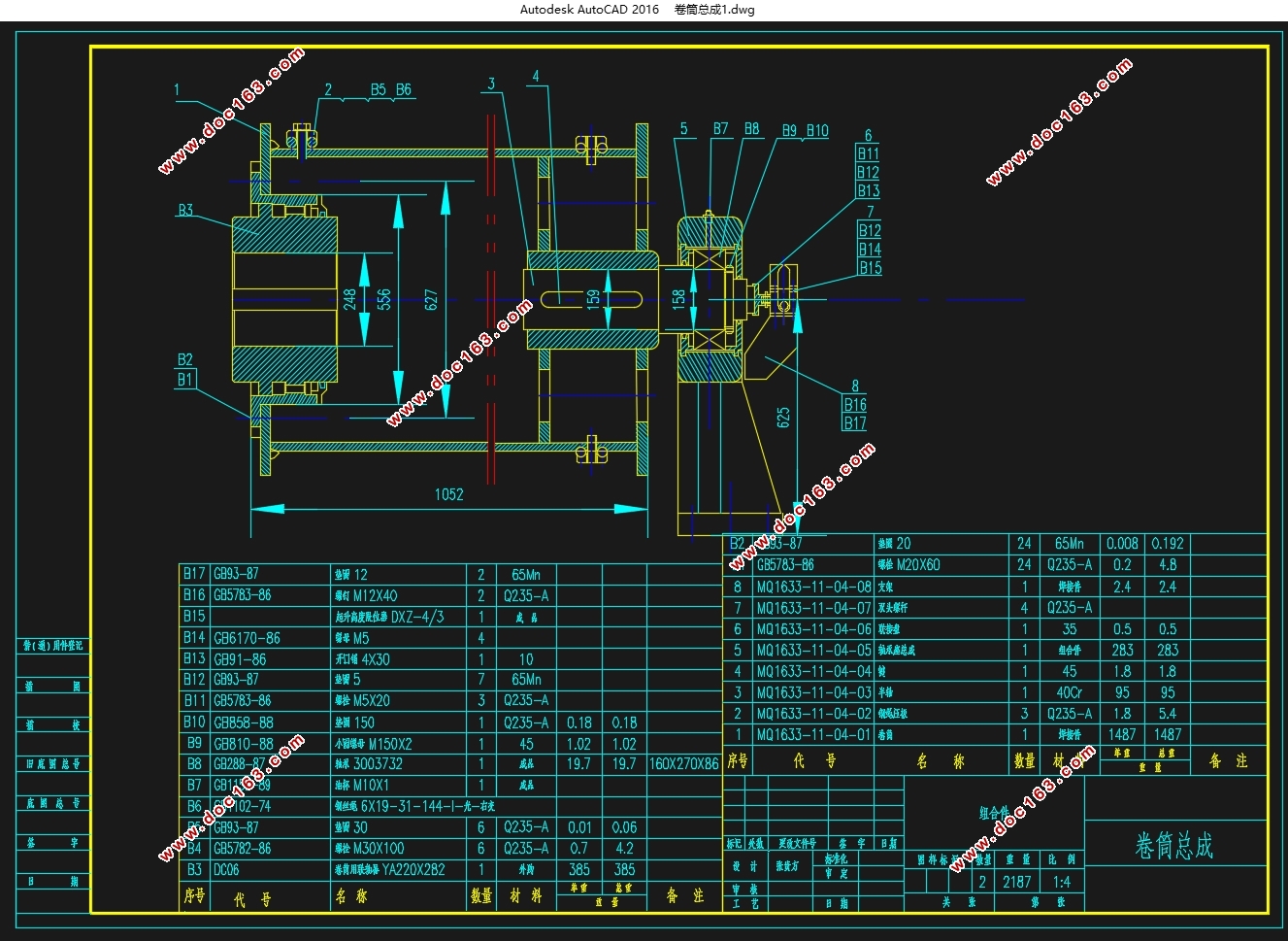
3.1.2 卷筒的尺寸与转速 32
3.1.3电机及减速器选型 33
3.1.4选择制动器 33
3.2 运用Creo对起升机构虚拟设计 34
3.2.1 实现卷筒虚拟设计 34
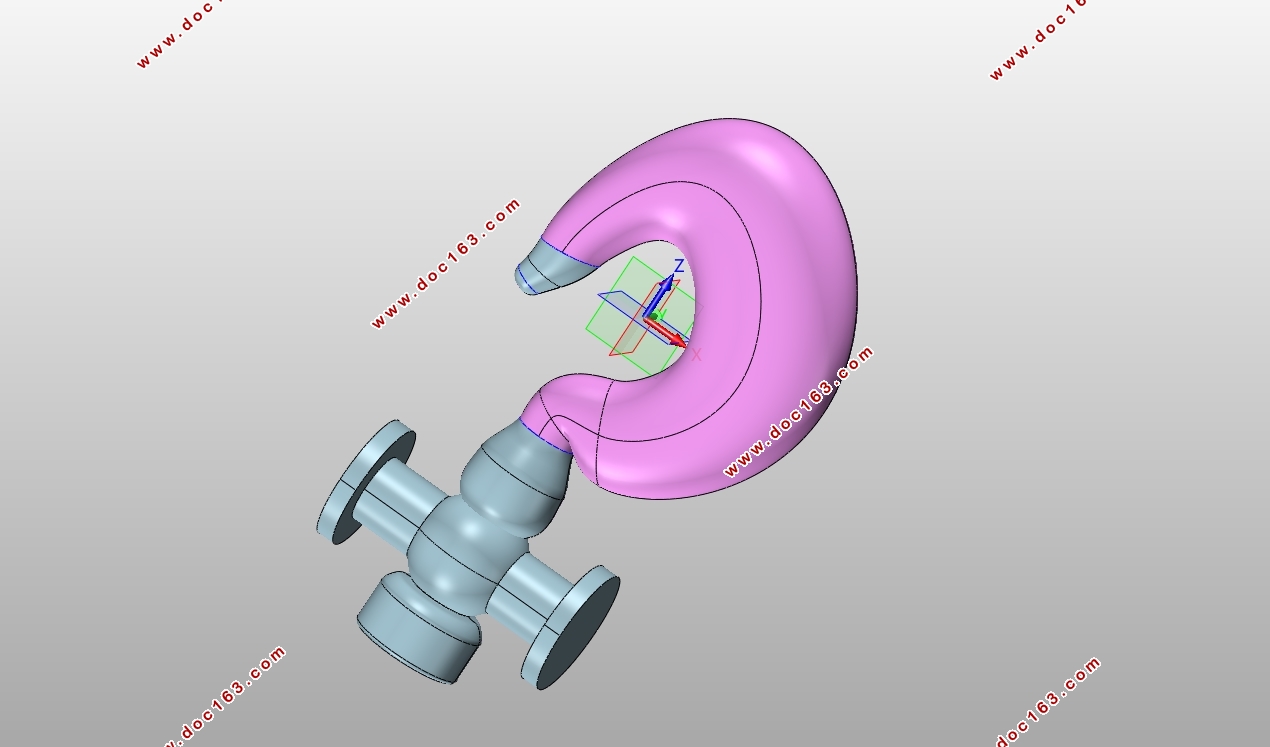
3.2.2 吊钩建模 37
第4章 经济性分析 40
第5章 全文总结与展望 41
致谢 43 [资料来源:http://www.doc163.com]
上一篇:16t四连杆门机总体设计及回转机构的虚拟设计(含CAD图,Creo三维图)
下一篇:16t四连杆门机总体设计及运动仿真设计(含CAD图,Creo三维图)