
16t四连杆门机总体设计及回转机构的虚拟设计(含CAD图,Creo三维图)
16t四连杆门机总体设计及回转机构的虚拟设计(含CAD图,Creo三维图)(任务书,开题报告,外文翻译,论文说明书17700字,CAD图3张,Creo三维图)
摘 要
对于目前港口门座起重机设计中出现的问题,本文以港口装卸四连杆MQ1635门座起重机作为范例,详细讲述了起重机的总体设计过程。其中包括作图法确定四连杆机构,货物水平性校验,象鼻梁端点水平速度校验。还讲述了回转机构的电机选型。其中包括减速器选型,制动器选型,电动机选型。此外还通过三维建模软件CREO建立了门座起重机回转机构的模型。
通过运用虚拟设计方法,获得了起重机的相关运动性能数据,为起重机的设计和性能评估提供了一种新的方法,减少设计开发成本。
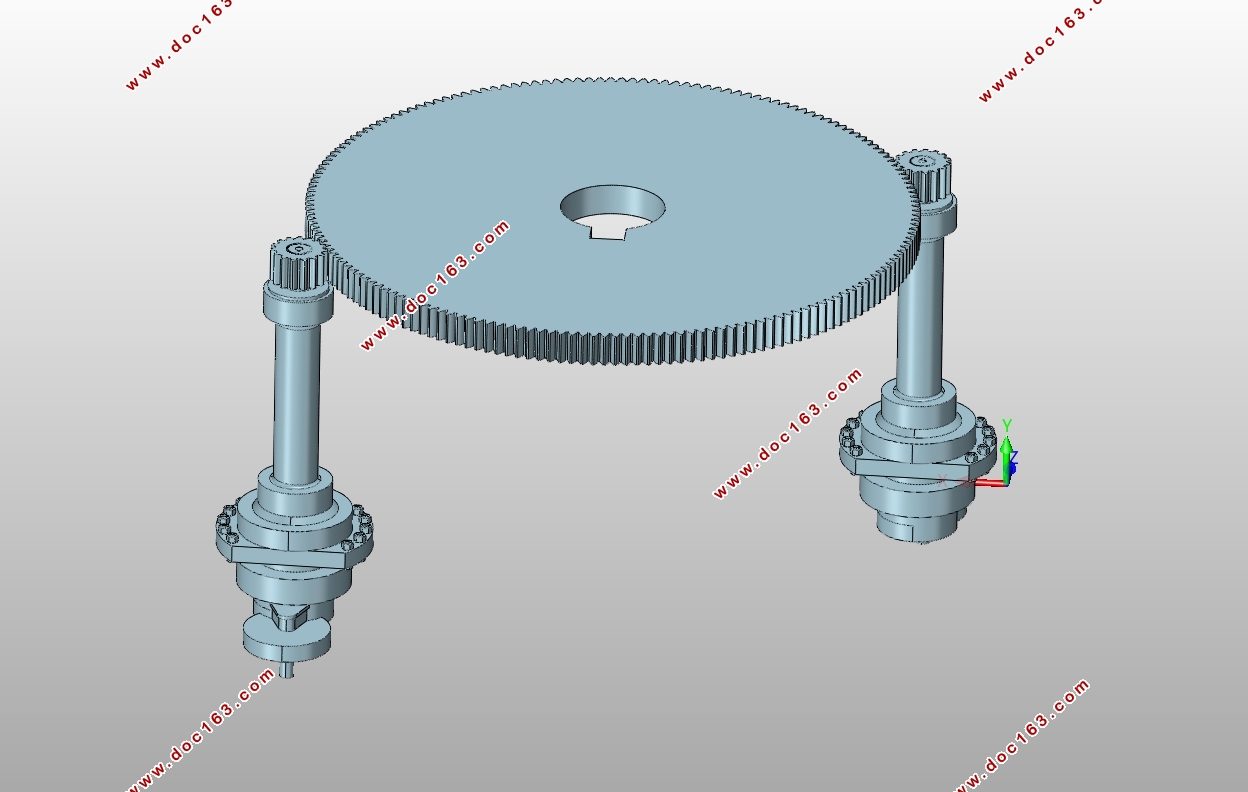
本文特色在于借助三维建模软件Creo建立门座起重机回转机构模型,通过对模型的观察,我们可以加深对机构的了解,扩展对机构运动的分析。
关键词:门座起重机;总体设计;Creo三维建模;
Abstract
For the problems in the design of Port Portal Crane, this paper describes the overall design process of the crane as an example with the port loading and unloading four link MQ1635 portal crane as an example. Including the determination of four linkage mapping method, the level of the goods check, check the speed of horizontal trunk beam end. Also describes the rotating mechanism of the motor selection. Including reducer selection, brake selection, motor selection. In addition, the model of the revolving mechanism of the portal crane is established by the 3D modeling software CREO.
[资料来源:http://www.doc163.com]
Through the use of virtual design method,Obtained the crane related sports performance data,for Crane design and performance evaluation provides a new method, Reduce the cost of design and development.
This paper is characterized by the use of three-dimensional modeling software Creo to establish a portal crane rotary mechanism model, through the observation of the model, we can deepen the understanding of the organization, the expansion of the analysis of the mechanism movement.
Key Words: portal crane; overall design; Creo 3D modeling;
2.1性能参数
起重机的技术参数表征起重机的作业能力,是设计起重机的基本依据。本次设计的港口装卸四连杆MQ1635门座起重机的主要性能参数见表2.1。
表2.1 主要性能参数表
项目名称 性能参数
起重量 吊钩
16t
工作幅度 最大幅度 35m
最小幅度 9.5m
起升高度 轨上 28m [资料来源:Doc163.com]
轨下 16m
工作速度 起升机构 22m/min
变幅机构 42m/min
回转机构 1.2r/min
运行机构 22m/min
工作级别 整机 A8
起升机构 M8
变幅机构 M7
回转机构 M7
运行机构 M4
基距/轨距 10.5/10.5m
工作状态最大风速 20m/s
非工作状态最大风速 55m/s
许用轮压 250kN
轨道型号 QU80
电源 380V/50Hz
[资料来源:https://www.doc163.com]
[来源:http://Doc163.com]

目 录
第1章 绪论 1
1.1课题的研究目的和意义 1
1.2国内外现状 1
第2章 总体设计计算 2
2.1性能参数 2
2.2 确定主要工作机构和金属结构的形式 3 [版权所有:http://DOC163.com]
2.2.1 确定主要工作机构形式 3
2.2.2 确定金属结构的形式 7
2.3 确定组合式四连杆臂架结构尺寸 11
2.4 用作图法进行货物水平位移补偿系统设计 11
2.4.1 货物水平位移补偿系统原理 11
2.4.2 刚性四连杆组合臂架方案的作图法设计 12
2.5 杠杆活对重式臂架自重平衡系统设计 19
2.5.1 杠杆活对重平衡系统工作原理 19
2.5.2 臂架自重平衡系统设计方法 19
2.6 各工况下工作机构、金属结构所受载荷 23
2.6.1 计算载荷 23
2.6.2 载荷组合 27
2.7 整机稳定性校核 27
2.7.1 基本原则 27
2.7.2验算工况、载荷系数和载荷组合 27
2.8 轮压计算 32
第3章 回转机构 36
3.1设计参数 36
3.2回转支承装置计算: 36 [资料来源:https://www.doc163.com]
3.3回转支承选型计算 37
3.4回转驱动装置计算: 37
3.4.1计算回转阻力矩 37
3.4.2电动机的选择与校核 39
3.4.3选择减速器 41
3.4.4选择制动器 41
3.4.5 极限力矩联轴节极限力矩计算 42
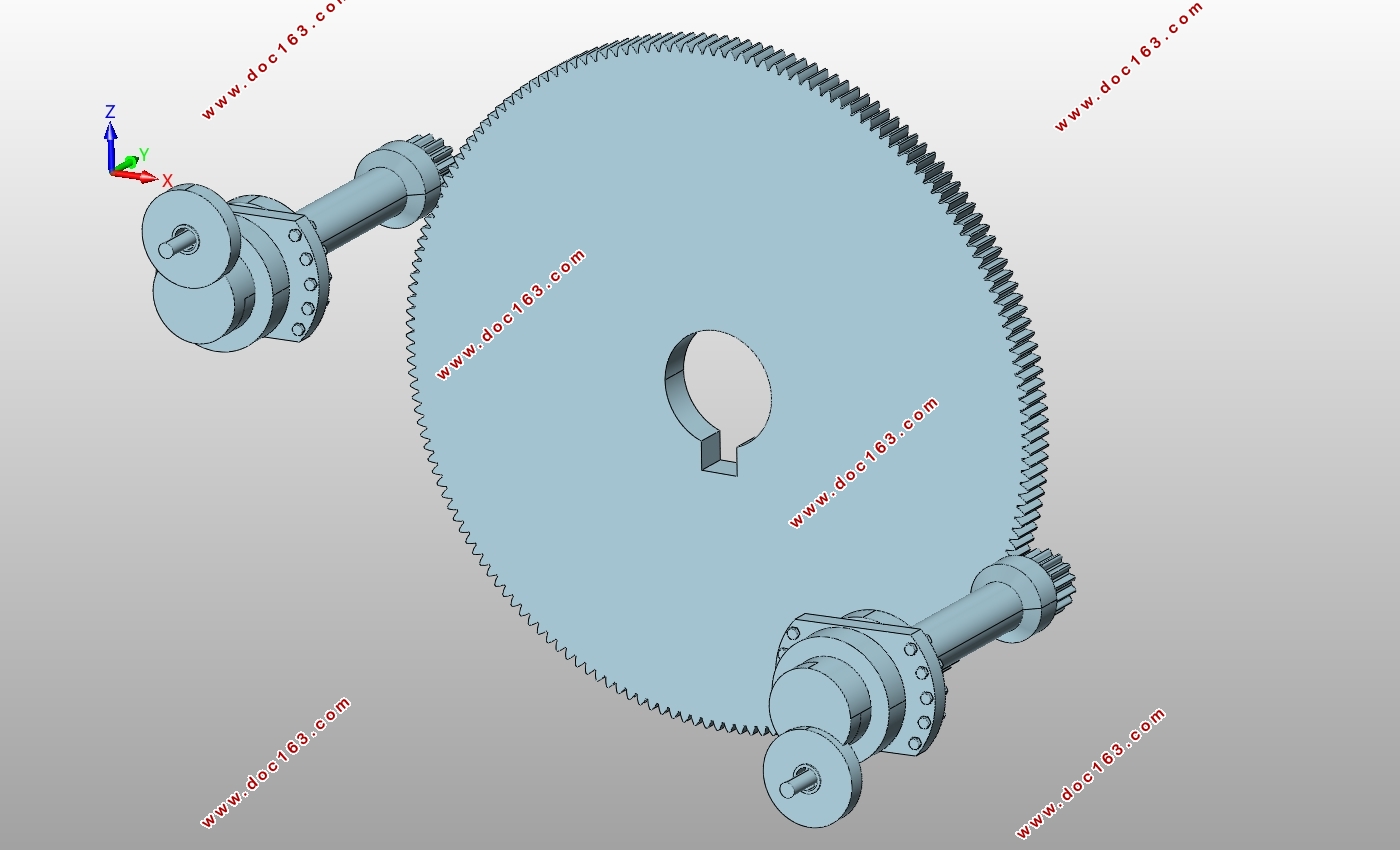
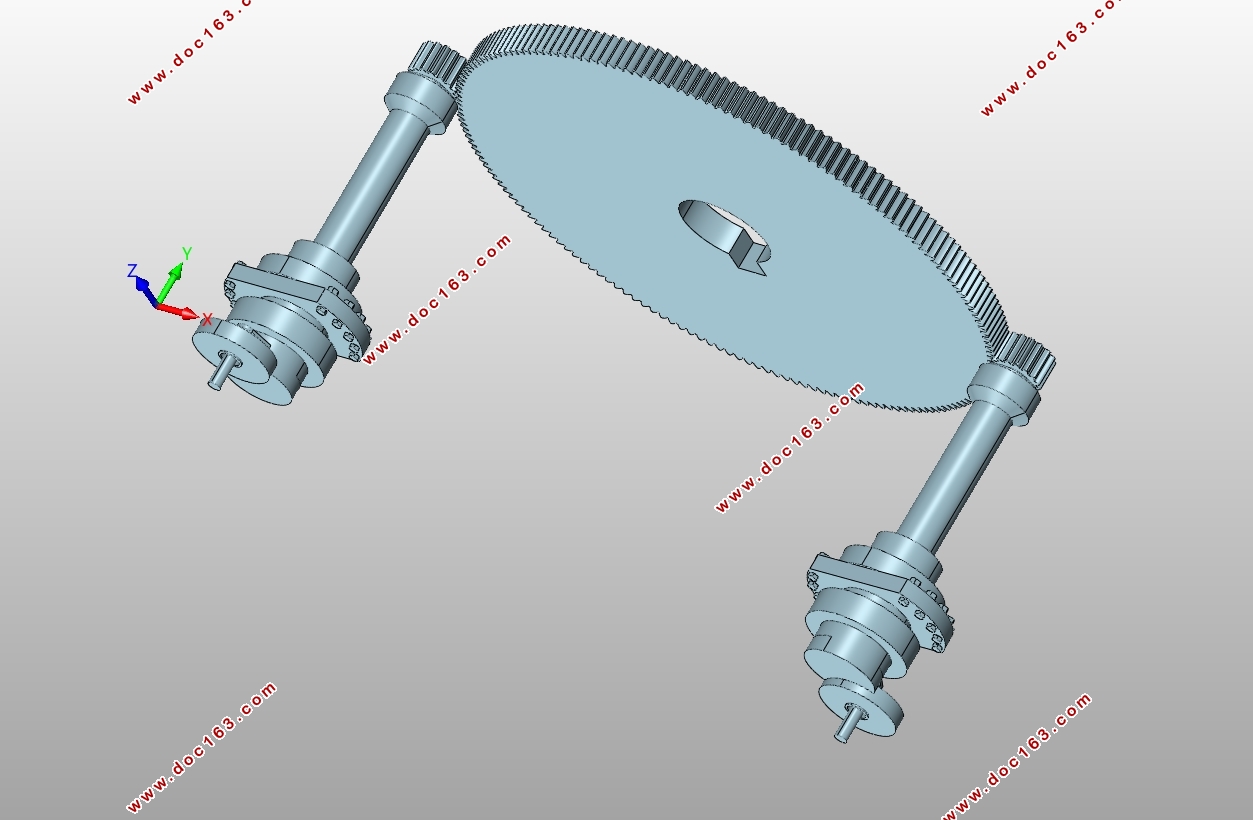
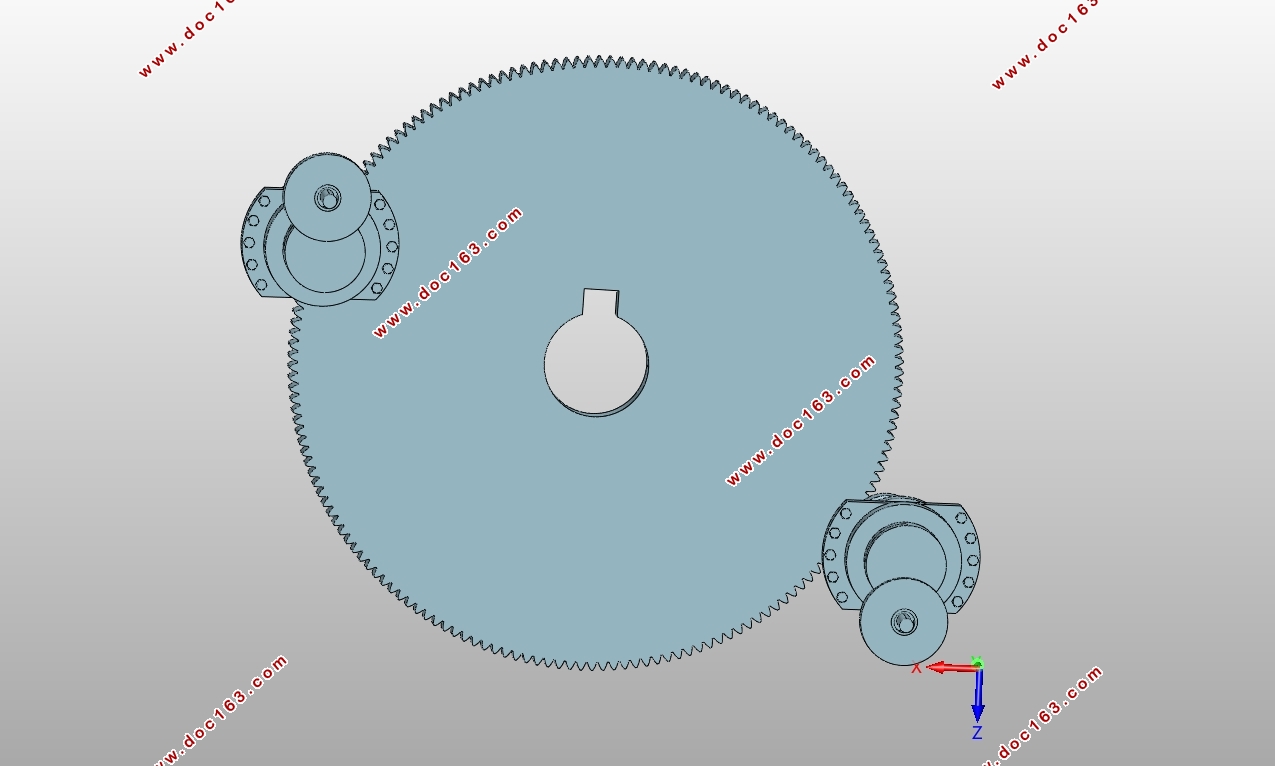
第4章 回转机构基于CREO平台虚拟设计 43
4.1Creo软件简介 43
4.2模型的创建 43
4.2.1行星齿轮减速器外表齿轮 43
4.2.2 安装在轴上的齿轮 44
4.2.3行星齿轮外壳 45
4.2.4回转平台齿轮 46
4.2.5螺栓 46
4.2.6螺母 47
4.3零件的装配 47
4.3.1齿轮的装配 47
4.3.2螺栓与螺母的装配 47
4.3.3装配图 47
4.4虚拟分析 48
第5章 经济性分析 49
第6章 总结与展望 50
参考文献 51
致谢 52
下一篇:16t四连杆门机总体设计及起升机构的虚拟设计(含CAD图,Creo三维图)