
МђвзздЖЏзщзАЛњЦїШЫЕФЩшМЦ(КЌcadСуМўЭМ,зАХфЭМ,ЕчТЗЭМ,ГЬађ)
1.ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
2.зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.НіЙЉбЇЯАВЮПМжЎгУ.
Ум Лн БЃ АяжњжааФ
МђвзздЖЏзщзАЛњЦїШЫЕФЩшМЦ(КЌcadСуМўЭМ,зАХфЭМ,ЕчТЗЭМ,ГЬађ)(ЫЕУїЪщ18600зж,CADЭМжН5еХ)
еЊ вЊЃКЫцзХЙњФкЭтЛњЦїШЫОКШќШШГБЕФаЫЦ№ЃЌДѓбЇЩњЧзздЖЏЪжжЦзїЛњЦїШЫвбГЩЮЊВЮМгЛњЦїШЫДѓШќЕФжївЊЗНЪНЁЃБОШЫзїЮЊКўФЯХЉвЕДѓбЇЖЋЗНПЦММбЇдК2011ФъбЧЬЋДѓбЇЩњЛњЦїШЫДѓШќЕФВЮШќЖгдБЃЌВЮгыСЫЛњЦїШЫЕФЩшМЦКЭжЦзїећИіЙ§ГЬЃЌдкДДаТЩшМЦФмСІЁЂЖЏЪжФмСІКЭХрбјЭХЖгКЯзїОЋЩёЕШЗНУцЖМЕУЕНСЫЬсИпЁЃЖјБОДЮЩшМЦЕФМђвзздЖЏзщзАЛњЦїШЫЪЧвЛЬЈздЖЏЛЏГЬЖШНЯИпЕФЛњЦїШЫЃЌетИіЛњЦїШЫгЩаазпФЃПщЁЂжїПиФЃПщКЭЛњаЕЪжБлзщГЩЁЃашвЊЭъГЩвЛЖЈФбЖШЕФ“ЫЎЕЦ”зщзАЙЄзїВЂНЋзщзАКУЕФЫЎЕЦЗХШы“аЁКг”жаЃЈЬтФПдДгк2011ФъбЧЬЋДѓбЇЩњЛњЦїШЫДѓШќЃЉЁЃетЖдЛњЦїШЫЕФОКељСІЁЂСщЛюадЁЂзМШЗадгаНЯИпвЊЧѓЁЃЛњЦїШЫЕФПижЦЯЕЭГВЩгУЕЅЦЌЛњЛђARMзїЕзВуПижЦФЃПщЃЌГфЗжРћгУЕЅЦЌЛњИпДІРэФмСІЁЃЛњЦїШЫЕФЛњаЕНсЙЙВЩгУТСаЭВФжЦзїЃЌРћгУТСаЭВФЧсБуМгЙЄЗНБуЕФгХЕуЁЃЛњЦїШЫЕФжїГЬађВЩгУCгябдБраДЁЃ
ЙиМќДЪЃКЛњЦїШЫЃЛLPC2103ЃЛATMEGA128ЃЛШЋЯђТжЃЛзщзА
The design of simple automatic assembly robot
Abstract: With the rise of domestic and international robot competition boom, hands-on production robot made by college students has become the main way in robot contest. As a student of orient technological institute, Hunan agricultural university, and a player of Asia-pacific college students robot contest, 2011, I participated in the entire process of design and manufacture of the robot, our ability in innovation and creation, and the spirit of cultivating teamwork have been improved in all aspects. The design of simple automatic assembly robot is a kind of higher automatization which composed by walking module, control module and mechanical arms modules. It’s a little difficult to complete the consistent of “water lanterns” and put them in the “small river” properly. (The subject comes from ABS Asia-Pacific Robot Contest) That requires higher standard in competitiveness, flexibility and accuracy in robot. The robot control system adopts single-chip microcomputer or ARM as bottom control module; make full use of single-chip microcomputer high processing ability. Robot mechanical structure was made of aluminum section that possessing the advantage in deft processing. The main program robot uses is C language.
[зЪСЯРДдДЃКhttps://www.doc163.com]
Key words: RobotЃЛLPC2103; ATMEGA128; Assembly;Omni-wheel
БОДЮЛњЦїШЫЩшМЦддђ
ЖдгкДЫДЮБШШќЕФЛњЦїШЫРДЫЕЃЌжївЊПМбщЕФЪЧЛњЦїШЫЕФаазпТЗЯпЁЂЛњЦїШЫдЫааЕФЮШЖЈадЁЂПьЫйадЁЂзМШЗадвдМАПЩВйзїадЁЃЭЈЙ§змНсЭљНьЕФОбщЃЌаЁзщжЦЖЈСЫШчЯТЛњЦїШЫЩшМЦддђЁЃ
1ЁЂЛњЦїШЫБиаыгыДѓШќЕФжїЬтЯрЮЧКЯЃЌДДвтЖРЕНЃЌдкзёбЙцдђЕФЧАЬсЯТФмЧЩУюЕиКЯРэЕиРћгУЙцдђЁЃ
2ЁЂЛњЦїШЫБиаыОпгаНЯИпЕФЫйЖШ(АќРЈМгЫйЖШ)ЃЌБШШќжаЫЕФЫйЖШПьЃЌЫОЭФмдкИќЖЬЕФЪБМфФкЭъГЩзщзААсдЫЙЄзїЃЌЧРЕУБШШќЕФЯШЛњЃЌвђДЫаЁзщжЦЖЈСЫЫйеНЫйОіЕФеНЪѕЁЃ
3ЁЂЛњЦїШЫБиаыЮШЁЂзМЁЃжИЛњЦїШЫдЫЖЏЕФЛњЖЏадЁЂЮШЖЈадКЭзщзАЫЎЕЦЕФзМШЗадЁЃЫйЖШжЛгагыЛњЖЏадЁЂСщЧЩадКЭзМШЗадНсКЯВХФмЯрЕУвцеУЁЃВХФмдкОКељМЄСвЃЌШќПіЫВЯЂЭђБфЕФБШШќжаЛёЕУЪЄРћЁЃ
4ЁЂЛњЦїШЫгІОпгаИпжЧФмЁЃФПЧАДѓВПЗжздЖЏЛњЦїШЫЩаДІгкдЄБрГЬЕФЫЎЦНЩЯЃЌЮоЗЈДяЕНИпвЊЧѓЕФЖЈЮЛБъзМЁЃШчЙћЛњЦїШЫЕФжЧФмЫЎЦНФмЙЛгаЫљЬсИпЃЌФмЙЛе§ШЗЕФДІРэЫВЯЂЭђБфЕФШќГЁаХЬсИпЖЈЮЛФмСІЃЌФЧУДОЭФмИќПьИќКУЕФЭъГЩзщзАКЭАсдЫЁЃ
5ЁЂЛњЦїШЫДњБэЖгЕФХфКЯФЌЦѕГЬЖШЁЃжИздЖЏЛњЦїШЫЁЂЪжПиЛњЦїШЫЕФЖЏЬЌХфКЯвЊКУЃЌвђЮЊБШШќВЛЪЧБШЦДЕЅЬЈЛњЦїШЫЕФЙІФмЁЃвђДЫЃЌаЁзщЬиБ№ЧПЕїЛњЦїШЫЭХЖгжЎМфЕФаЭЌзїеНЁЃ
[зЪСЯРДдДЃКwww.doc163.com]
2.3 БШШќВпТд
дкБШШќвЛПЊЪМЛњЦїШЫОЭвдзюЖЬТЗЯпдЫЖЏЕНзщзАЧјгђЃЌВЂРћгУБрТыХЬЕМв§ЕїећааЖЏЮѓВюБЃжЄзюКѓзМШЗЕФЖЈЮЛдкзщзАЧјжааФЮЛжУЃЌШЛКѓЛњЦїШЫзЊЯђШЅзЅШЁД§зщзАЕФЫЎЕЦВПМўНјаазщзАЃЌЭъГЩзщзАКѓНЋзщзАКУЕФЫЎЕЦМаШЁЗХШыаЁКгжаЁЃ
2.4 бажЦИХвЊ
ИљОнДѓШќжїЬтвдМАЙцдђЃЌаЁзщОЙ§СЫЖрДЮМЏЬхПЊЛсЬжТлЃЌГѕВНШЗЖЈСЫПижЦЯЕЭГЕФЩшМЦЗНАИЁЃ
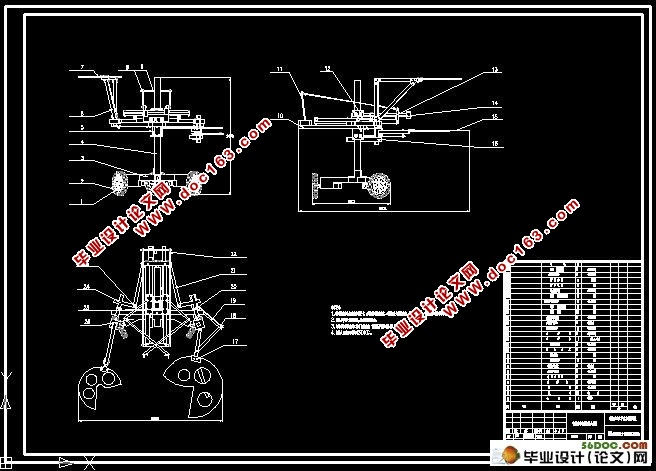
1. ЪжЖЏЛњЦїШЫШЮЮёЃКНЋ3ОДЯуХшЗХжУдкЦеЭЈЧјЃЌШЛКѓНЋДјРДвЛИіЛљзљКЭРЏжђзАЪЮЗХдкзщзАЕузхЮЛжУЃЌВЂЧвИУЪжЖЏЛњЦїШЫНЋЪеМЏЦеЭЈЧјЕФРЏжђЃЌдйДЮгУгкдкЫЎЕЦДѓЛсЁЃ
2. здЖЏЛњЦїШЫЃКНЋЪеМЏЫЎЕЦЛЈАъКЭЛЈЃЌВЂАбЫќУЧАкЗХдкзМБИЕуЁЃ
3. здЖЏзщзАЛњЦїШЫЃКНЋЛсздЖЏЖбЕўЃЈзщзАЃЉвЛЫЎЕЦКЭвЛЛЈАъдкЮЛгкзщзАЕузхЕФРЏжђЛљзљЩЯЃЌШЛКѓНЋзщзАКУЕФЫЎЕЦЗХШыаЁКгжаЁЃ
3 здЖЏзщзАЛњЦїШЫЛњаЕЩшМЦ

 [зЪСЯРДдДЃКwww.doc163.com]
[зЪСЯРДдДЃКwww.doc163.com] 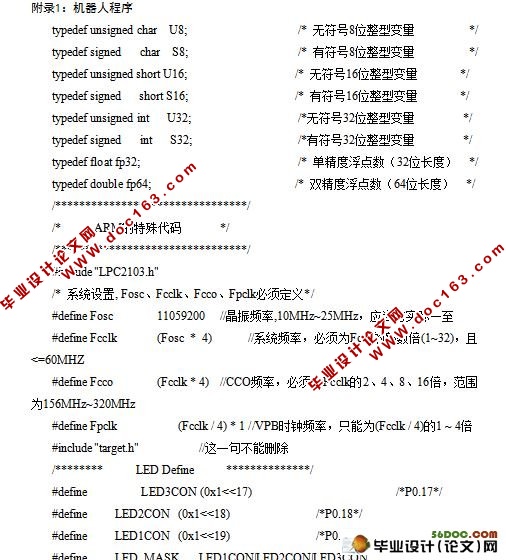
ФП ТМ
еЊ вЊ 1
ЙиМќДЪ 1
1 ЧАбд 2
1.1 2011ФъбЧЬЋЛњЦїШЫДѓШќБШШќжїЬтгыЙцдђ 2
2 ЛњЦїШЫДДвтЩшМЦгыЗНАИ 3
2.1 ЛњЦїШЫвЛАузщГЩ 3
2.2 ЛњЦїШЫЩшМЦддђ 4
2.3БШШќВпТд 4
2.4 бажЦИХвЊ 4
3 ЛњЦїШЫЛњаЕЩшМЦ 5
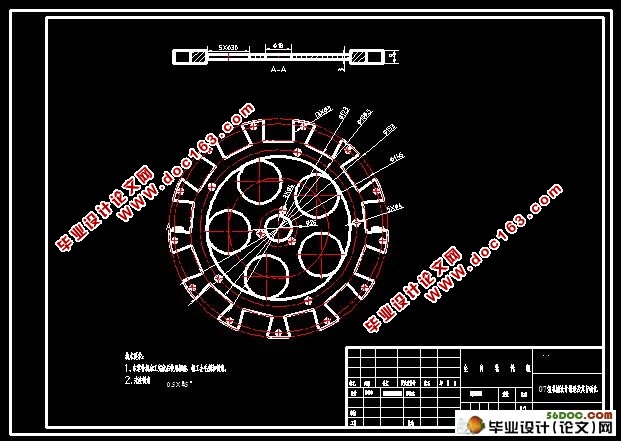
3.1 ТжзгКЭЕзХЬЕФбЁдёгыЩшМЦ 5 [зЪСЯРДдДЃКhttp://www.doc163.com]
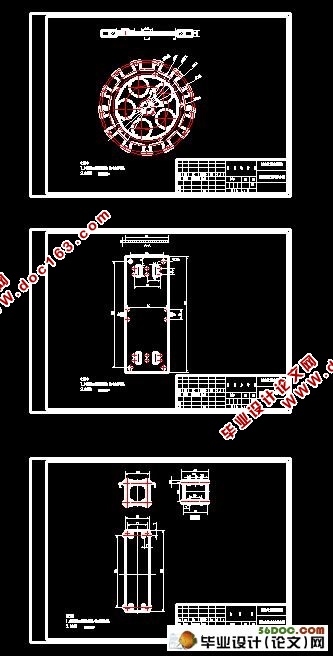
3.2 Щ§НЕЛњЙЙЕФЩшМЦ 7
3.3 МаШЁЛњЙЙЩшМЦ 8
4 ЛњЦїШЫЕчТЗгВМўбЁдё 9
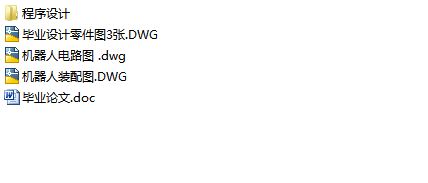
4.1 CPUЕФбЁдё 9
4.2ЛњЦїШЫжїПижЦАхНсЙЙМАЫЕУї 12
4.2.1 LPC2103ЕчдДФЃПщ 12
4.2.2 зюаЁЯЕЭГ 13
4.2.3 ШЫЛњНЛЛЅНчУц 13
4.2.4 жїПижЦАхЪЕЮяЭМ 18
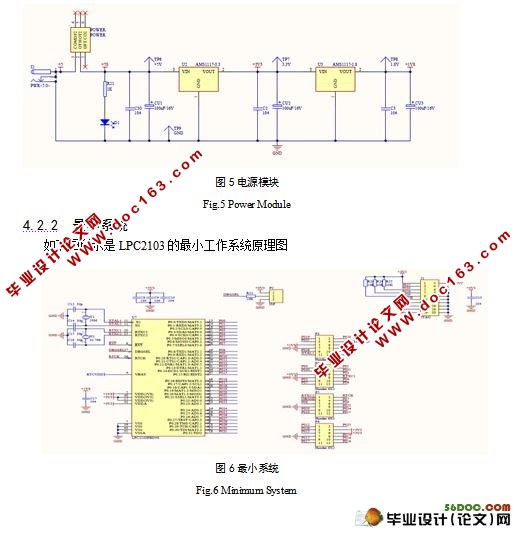
4.3 ЕчЛњЫХЗўПижЦ 19
4.4 БрТыХЬВЩбљ 24
4.5 ЙтЕчДЋИаЦї 25
5 жїПижЦАхГЬађЩшМЦ 27
5.1 ARMжїГЬађСїГЬЭМ 27
5.2 PWMЕФВњЩњ 29
5.2.1 ШэМўЩњГЩPWM 29
5.2.2гВМўЩњГЩPWM 30
5.3жаЮФвКОЇЯдЪО12864ГЬађЩшМЦ 33
6 ЯЕЭГЕФЕїЪд 39
7 зм Нс 39
ВЮПМЮФЯз 39
жТ аЛ 40
ИНТМ 41 [РДдДЃКhttp://www.doc163.com]
ЩЯвЛЦЊЃКФГФЃОпМгЙЄГЕМфОМУзЈгУаЭЧХЪНСњУХЯГДВећЬхЩшМЦ
ЯТвЛЦЊЃКздЖЏЗРЕСУХПЊЫјЛњЙЙ(ЛњаЕЪж)ЩшМЦ