
ЦНвЦЪНЛњаЕЪжПижЦЯЕЭГЩшМЦ(КЌCADЭМ)

1.ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
2.зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.НіЙЉбЇЯАВЮПМжЎгУ.
Ум Лн БЃ АяжњжааФ
ЦНвЦЪНЛњаЕЪжПижЦЯЕЭГЩшМЦ(КЌCADЭМ)(ШЮЮёЪщ,ПЊЬтБЈИц,ЭтЮФЗвы,ЮФЯзеЊвЊ,ТлЮФЫЕУїЪщ16000зж,CADЭМ2еХ)
еЊ вЊ
ЫцзХЯжДњЙЄвЕММЪѕЕФЗЂеЙЃЌЛњаЕЪждкЯжДњЙЄвЕжаЕФгІгУдНРДдНЙуЗКЃЌЫќПЩвдДњЬцШЫдкИДдгЮЃЯеЕФЛЗОГжаЙЄзїЁЃЖјетаЉЛњаЕЪжжавдЖўздгЩЖШЛњаЕЪжгІгУзюЮЊЙуЃЌЫќНсЙЙМђЕЅЃЌВйзїЗНБуЃЌБугкЪЕЯжздЖЏЛЏЁЃ
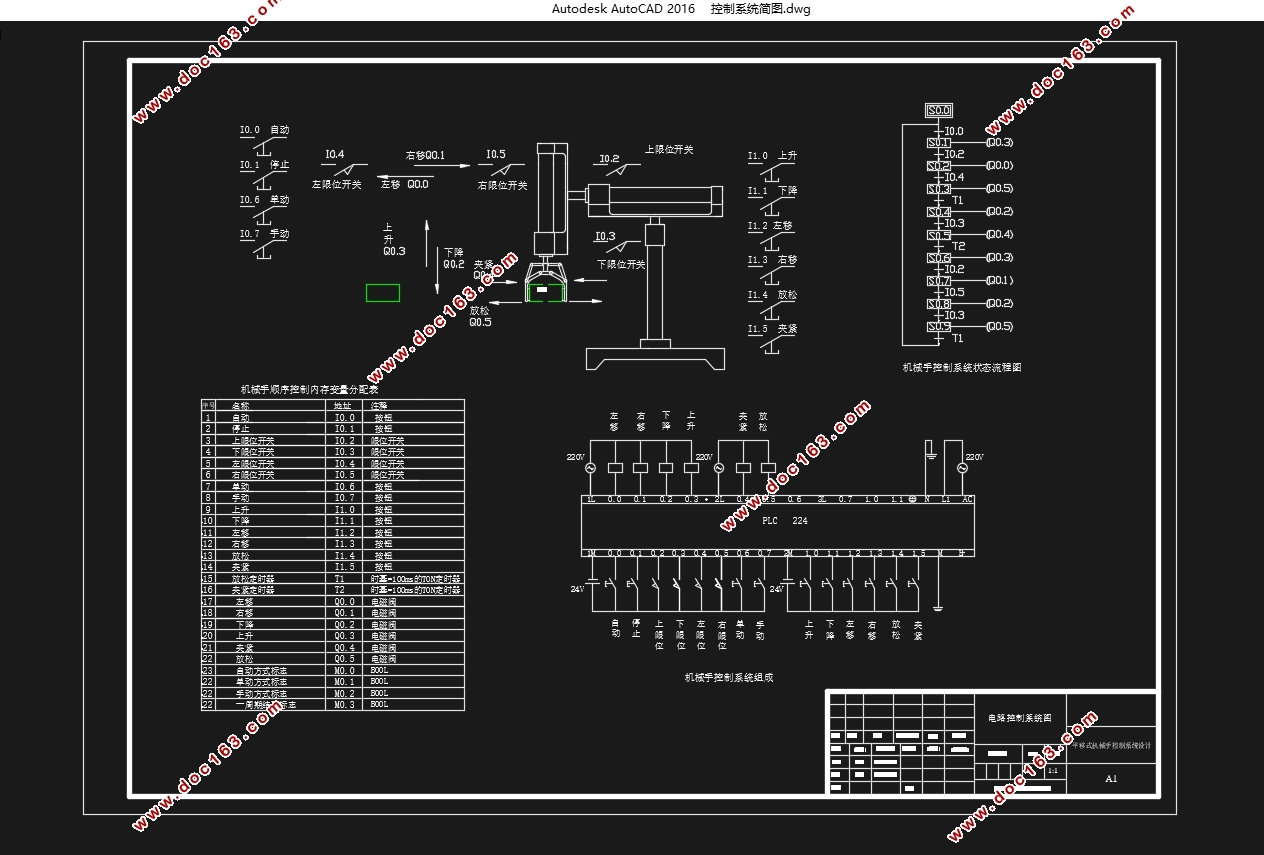
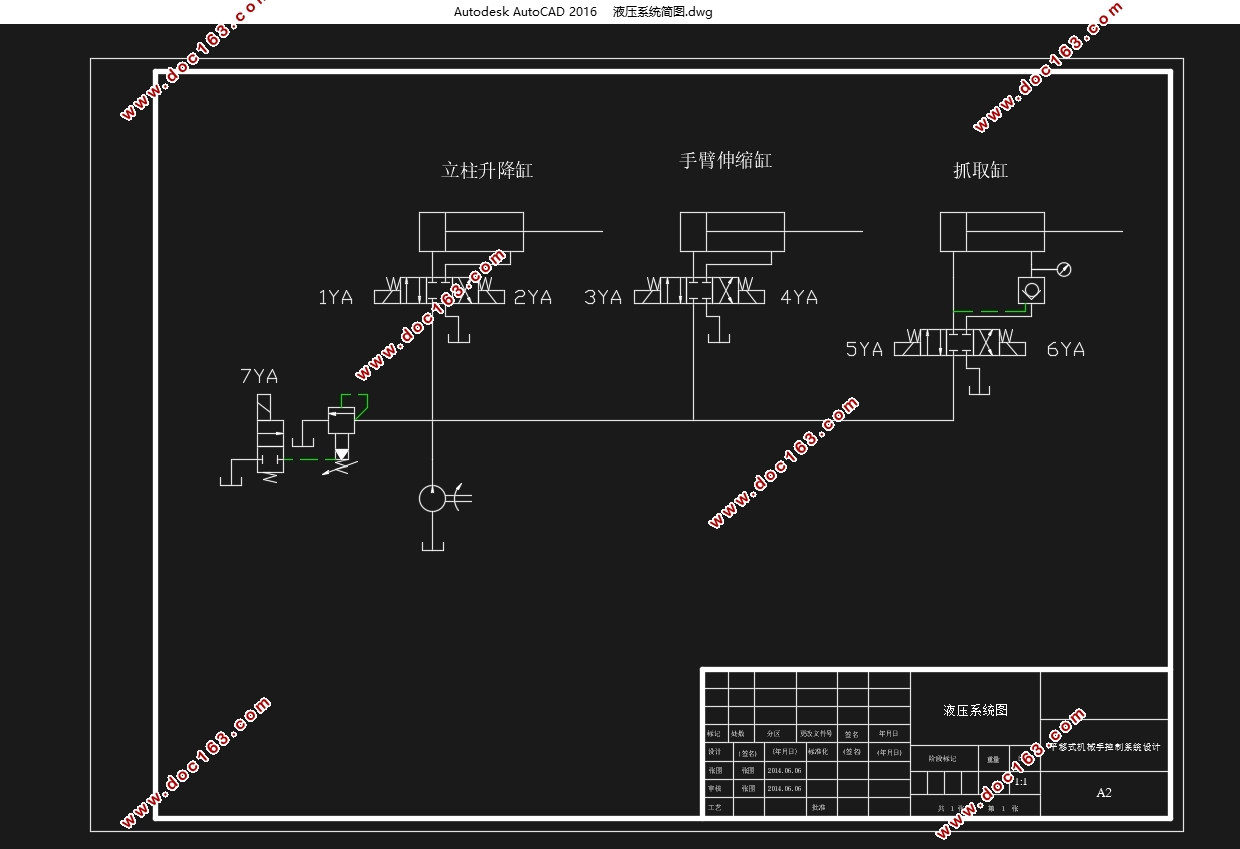
БОЮФЪзЯШЖдЯжДњЙЄвЕгІгУзюЙуЕФПижЦЯЕЭГНјааСЫМђНщЃЌВЂЯъЪіСЫЦфЗЂеЙРњЪЗМАЦфЧАОАЁЃЖдБШЗжЮіЧАШЫЫљзіЛњаЕЪжЃЌНЋЛњаЕЪжЗжЮЊЛњаЕВПЗжКЭПижЦВПЗжЗжБ№НјааЩшМЦЁЃЦфжаЛњаЕВПЗжАќРЈМаГжЦїЕФЩшМЦЁЂЪжБлВПЗжЕФЩшМЦКЭЛњаЕЪжзмЬхНсЙЙЩшМЦЁЃДЫДЮЩшМЦЕФЛњаЕЪжКсЯђааГЬ200mmЃЌзнЯђааГЬ100mmЃЌПЩМаГжЙЄМўГпДч150mm*100mm*120mmЁЃНгЯТРДЖдЛњаЕЪжЕФПижЦЯЕЭГзіСЫЯъЯИТлЪіЃЌЯШМђЕЅНщЩмСЫБрГЬПижЦЦїЃЌШЛКѓЖдЛњаЕЪжПижЦвЊЧѓНјааСЫЗжЮіЃЌбЁЖЈСЫS7-200ЯЕСаЕФCPU224зїЮЊПижЦЦїЃЌВЂЧвЛцжЦСЫПЩБрГЬПижЦЦїЭтВПНгЯпЭМЁЂБфСПЗжХфБэЁЂзДЬЌСїГЬЭМЃЌЩшМЦСЫЛњаЕЪжЕФЯЕЭГГЬађЁЃЛЙЗжЮіСЫЦфЧ§ЖЏЯЕЭГЃЌЛцжЦСЫвКбЙЯЕЭГЭМВЂЧвМђЪіСЫвКбЙЯЕЭГЕФЙЄзїдРэЁЃзюКѓЗжЮіЬжТлШ§ЮЌНЈФЃКЭдЫЖЏЗТецЕФФПЕФКЭвтвхЃЌВЂЧвгІгУШ§ЮЌНЈФЃШэМўPro/EНЋЛњаЕЪжЫљгаСуМўНјааСЫШ§ЮЌНЈФЃЃЌВЂНјааСЫзщзАКЭдЫЖЏЗТецЃЌзюжеЕУЕНЛњаЕЪжЕФдЫЖЏЗТецЪгЦСЁЃ [РДдДЃКhttp://Doc163.com]
ЙиМќДЪЃКЛњаЕЪж ПижЦЯЕЭГ Pro/E дЫЖЏЗТец
The design of manipulator control system
Abstract
With the development of modern industrial technology, manipulator applications in modern industry more widely, can replace the people working in hazardous and complex environments. But, In these manipulator two degrees of freedom manipulator the most extensive, simple structure, easy to operate, easy to automate.
Firstly, the most widely used control systems in modern industrial was introduced and its history and its prospects are described in detail. Comparison and analysis of what has been done, then divided into mechanical part and control part into each design. In mechanical part including the design of the holder, design manipulator arm portion and the overall structure . The design of the manipulator cross travel 200mm , longitudinal travel 100mm, can clamp the work piece size 150mm * 100mm * 120mm . Next, a detailed discussion of the manipulator control system, briefly introduced the programmable controller, then analyzes the manipulator control requirements, selected S7-200 series CPU224 as a controller, and rendering the programmable controller external wiring diagram, variable allocation table, state flowcharts and designed manipulator system program. Further analysis of its drive system, drawn the hydraulic system and outlines the principle of hydraulic system. Finally discuss the purpose and significance of 3D modeling and motion simulation, and the application of three-dimensional modeling software Pro / E all the robot parts for 3D modeling , assembled and motion simulationЃЌultimately get the manipulator motion simulation screen . [зЪСЯРДдДЃКwww.doc163.com]
Keywords: Manipulator, Control System, Pro / E, Motion Simulatio
[зЪСЯРДдДЃКhttp://Doc163.com]

ФП ТМ
еЊ вЊ I
Abstract II [зЪСЯРДдДЃКhttp://Doc163.com]
ФП ТМ i
ЕквЛеТ аїТл 1
1.1 ЧА бд 1
1.2 ПижЦЯЕЭГМђНщ 1
1.2.1 ПЊЛЗПижЦЯЕЭГ 1
1.2.2БеЛЗПижЦЯЕЭГ 1
1.2.3КужЕПижЦЯЕЭГ 2
1.2.4ЫцЖЏПижЦЯЕЭГ 2
1.3 ПижЦЯЕЭГЗЂеЙРњЪЗМАЧАОА 2
1.3.1ПижЦЯЕЭГЗЂеЙРњЪЗ 2
1.3.2ПижЦЯЕЭГЗЂеЙЧАОА 4
1.4 БОЮФбаОПФкШнМАвтвх 5
ЕкЖўеТ ЛњаЕЪжЛњаЕЯЕЭГЩшМЦ 6
2.1 ЛњаЕЪжМаГжЦїЩшМЦ 6
2.1.1ЛњаЕЪжМаГжЦїМђНщ 6
2.1.2ЛњаЕЪжМаГжЦїЩшМЦ 7
2.2 ЛњаЕЪжЪжБлВПЗжЩшМЦ 7
2.2.1ЪжБлЧ§ЖЏЯЕЭГМђНщ 7
2.1.2ЪжБлЧ§ЖЏЯЕЭГЩшМЦ 8
2.3ЛњаЕЪжзмЬхНсЙЙ 9
ЕкШ§еТ ЛњаЕЪжПижЦЯЕЭГЩшМЦ 11
[зЪСЯРДдДЃКDoc163.com]
3.1 ПЩБрГЬПижЦЦїМђНщ 11
3.1.1ПЩБрГЬПижЦЦїЕФВњЩњЁЂЗЂеЙгыгУЭО 11
3.1.2ПЩБрГЬПижЦЦїЕФзщГЩКЭЙЄзїдРэ 14
3.1.3ПЩБрГЬПижЦЦїЕФЬиЕуМАЗжРр 17
3.2ЛњаЕЪжЕчТЗЯЕЭГЩшМЦ 20
3.2.1ЛњаЕЪжПижЦвЊЧѓЗжЮі 20
3.2.2ПЩБрГЬПижЦЦїбЁаЭ 21
3.2.3ПЩБрГЬПижЦЦїЕФЕчТЗЩшМЦ 22
3.2.4ПЩБрГЬПижЦЦїЕФШэМўЩшМЦ 24
3.3ЛњаЕЪжвКбЙЯЕЭГЩшМЦ 28
3.3.1ЛњаЕЪжвКбЙПижЦвЊЧѓЗжЮі 28
3.3.2ЛњаЕЪжвКбЙПижЦЯЕЭГЩшМЦ 29
ЕкЫФеТ Ш§ЮЌНЈФЃгыдЫЖЏЗТец 31
4.1дЫЖЏЗТецЕФФПЕФ 31
4.2дЫЖЏЗТецЕФЪЕЯжМАЬжТл 31
ЕкЮхеТ змНс 34
ВЮПМЮФЯз 35
жТ аЛ 37 [РДдДЃКhttp://www.doc163.com]
ЩЯвЛЦЊЃКDADаЭЬЋбєФмИњзйЧ§ЖЏзАжУЩшМЦ(КЌCADЭМ)
ЯТвЛЦЊЃКЕЅХХШ§ХХЛњДВВМОжгХЛЏЩшМЦ(КЌCADЭМ,VBГЬађ)