
БеЛЗВННјЫХЗўЯЕЭГТнОрЮѓВюЗжЮіМАВЙГЅзАжУЕФЩшМЦ

1.ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
2.зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.НіЙЉбЇЯАВЮПМжЎгУ.
Ум Лн БЃ АяжњжааФ
БеЛЗВННјЫХЗўЯЕЭГТнОрЮѓВюЗжЮіМАВЙГЅзАжУЕФЩшМЦ(КЌCADЕчЦјЭМКЭзАХфЭМ))(ШЮЮёЪщ,ПЊЬтБЈИц,ЭтЮФЗвы,ТлЮФЫЕУїЪщ22000зж,cadЭМжН5еХ)
[еЊвЊ]Ъ§ПиММЪѕКЭЪ§ПизАБИЪЧжЦдьЙЄвЕЯжДњЛЏЕФживЊЛљДЁЁЃетИіЛљДЁЪЧЗёРЮЙЬжБНггАЯьЕНвЛИіЙњМвЕФОМУЗЂеЙКЭзлКЯЙњСІЃЌЙиЯЕЕНвЛИіЙњМвЕФеНТдЕиЮЛЁЃвђДЫЃЌЪРНчЩЯИїЙЄвЕЗЂДяЙњМвОљВЩШЁжиДѓДыЪЉРДЗЂеЙздМКЕФЪ§ПиММЪѕМАЦфВњвЕЁЃдкЮвЙњЃЌЪ§ПиММЪѕгызАБИЕФЗЂеЙврЕУЕНСЫИпЖШжиЪгЃЌНќФъРДШЁЕУСЫЯрЕБДѓЕФНјВНЁЃЬиБ№ЪЧдкЭЈгУЮЂЛњЪ§ПиСьгђЃЌвдPCЦНЬЈЮЊЛљДЁЕФЙњВњЪ§ПиЯЕЭГЃЌвбОзпдкСЫЪРНчЧАСаЁЃЕЋЪЧЃЌЮвЙњдкЪ§ПиММЪѕбаОПКЭВњвЕЗЂеЙЗНУцврДцдкВЛЩйЮЪЬтЃЌЬиБ№ЪЧдкММЪѕДДаТФмСІЁЂЩЬЦЗЛЏНјГЬЁЂЪаГЁеМгаТЪЕШЗНУцЧщПігШЮЊЭЛГіЁЃдкаТЪРМЭЕНРДЪБЃЌШчКЮгааЇНтОіетаЉЮЪЬтЃЌЪЙЮвЙњЪ§ПиСьгђбизХПЩГжајЗЂеЙЕФЕРТЗЃЌДгећЬхЩЯШЋУцТѕШыЪРНчЯШНјааСаЃЌЪЙЮвУЧдкЙњМЪОКељжагаОйзуЧсжиЕФЕиЮЛЃЌНЋЪЧЪ§ПибаОППЊЗЂВПУХКЭЩњВњГЇМвЫљУцСйЕФживЊШЮЮёЁЃЮЊЭъГЩДЫШЮЮёЃЌЪзЯШБиаыШЗСЂЗћКЯжаЙњЙњЧщЕФЗЂеЙЕРТЗЁЃЮЊДЫЃЌБОЮФДгзмЬхеНТдКЭММЪѕТЗЯпСНИіВуДЮМАЪ§ПиЯЕЭГЁЂЙІФмВПМўЁЂЪ§ПиећЛњЕШМИИіОпЬхЗНУцЬНЬжСЫаТЪРМЭЕФЗЂеЙЭООЖЁЃ
Ъ§ПиММЪѕЪЧЛњаЕЕчзгМЦЫуЛњМАздЖЏПижЦЕШММЪѕгаЛњНсКЯЕФвЛУХИпаТММЪѕЃЌвбЙуЗКгІгУгкЛњаЕжЦдьСьгђЃЌЪЙжЦдьММЪѕЯђИпЫйЛЏздЖЏЛЏИпОЋЛЏМЏГЩЛЏжЧФмЛЏЭјТчЛЏЗНЯђЗЂеЙЃЌЪЙЛњаЕВњЦЗдкадФмЩЯЯђИпОЋЖШИпаЇТЪИпадФмжЧФмЛЏЗНЯђЗЂеЙЃЌдкЙІФмЩЯЯђаЁаЭЛЏЧсаЭЛЏЖрЙІФмЗНЯђЗЂеЙЃЌдкВуДЮЩЯЯђЯЕЭГЛЏМЏКЯМЏГЩЛЏЗНЯђЗЂеЙЁЃзЈМвдЄбдЃЌЮДРДжЦдьвЕЕФОКељдкКмДѓГЬЖШЩЯЪЧЪ§ПиММЪѕЕФОКељЁЃ [зЪСЯРДдДЃКwww.doc163.com]
ЮЊЪЙБОПЦЩњбаОПЩњбЇЯАбаОПЪ§ПиММЪѕЃЌЪЙбаОПепКЭЪЕбщепГфЗжСЫНтКЭеЦЮеЪ§ПиЛЗНкМАЪ§ПиЙ§ГЬЁЃЮвУЧбЇаЃвРЭаЩТЮїЪЁЪ§ПиММЪѕКЭЙЄвЕздЖЏЛЏжиЕуЪЕбщЪвЃЌЩъБЈСЫЪ§ПиЪдбщЬЈбажЦПЦбаЯюФПЁЃИУЪдбщЬЈРћгУЙЄПиЛњКЭдЫЖЏПижЦЦїЖдXYZABЮхИізјБъНјааПижЦЃЌВЩгУЮЛвЦМьВтзАжУЖдЪ§ПизАжУжДааМўЕФЮЛвЦНјааВтСПЁЃзјБъПижЦаХЯЂМьВтаХЯЂгУЮЂЛњCRTДѓЦСФЛЯдЪОЁЃећИіЪдбщЬЈЯЕЭГВЩгУПЊЗХЪНФЃПщЪННсЙЙЃЌбаОПепПЩвдИљОнашвЊЖдЯЕЭГНјааРЉеЙЁЃПЩМћЃЌБОЪдбщОпгаКмЧПЕФВйзїадЃЌЪЧбЇЯАЪ§ПиММЪѕПЮГЬБивЊЕФЪЕбщЩшБИЁЃ
дкЪ§ПиЛњДВжа ,ЫХЗўЯЕЭГЪЧЪ§ПиЛњДВзАжУКЭЛњДВЕФжаМфСЌНгЛЗНк,ЪЧЪ§ПиЯЕЭГЕФживЊзщГЩВПЗжЁЃЫХЗўЯЕЭГНгЪмРДздЫХЗўПижЦЦїЕФНјИјТіГх,ОБфЛЛКЭЗХДѓзЊЛЛЮЊЛњДВЙЄзїЬЈЕФЮЛвЦ ,ЪЙЙЄзїЬЈИњЫцжИСю ТіГхвЦЖЏ ЁЃ
Ъ§ПиЛњДВГЄЦкдЫааКѓ ,ДЋЖЏЛњЙЙЕФЗДЯђМфЯЖКЭТн ОрЮѓВюЖдЖЈЮЛЮѓВюЕФгАЯьЯрЖдЭЛГі ,гЩгкЛњаЕФЅЫ№ ,ЪЙ ЫПИмТнОрЮѓВюдіДѓ ,МгЙЄОЋЖШЕУВЛЕНБЃжЄ ЁЃЖјЦѓвЕРяЕФДѓЖрЪ§Ъ§ПиЛњДВЖМдкГЌадФмКЭГЌГаЪмФмСІзДПіЯТдЫзЊ , ЖЈЦкМьВтЛњДВЕФЮѓВюВЂМАЪБаЃе§ЗДЯђМфЯЖЁЂТнОрЕШФмЙЛЧаЪЕИФЩЦЛњДВОЋЖШ , ИФЩЦСуМўМгЙЄжЪСП ЁЃвђ ДЫ ,ЦѓвЕУПИєвЛЖЈЕФЪБМфБиаыНјаавЛДЮЫПИмТнОрЮѓВюВЙГЅЕФЕїећ, етЖдгкЬсИпЛњДВЕФМгЙЄОЋЖШЗЧ ГЃ Би вЊЁЃМЄЙтИЩЩцвЧЖдЮѓВюЕФВтСПОЋЖШКмИп ,ЕЋМлИёАКЙѓ ,ашвЊзЈШЫВйзї ,ВЛЪЪвЫдкЩњВњЯжГЁЛЗОГЯТЙЄзї ЁЃВН ОрЙцВтСПжЦдьМђЕЅ ,ВйзїЗНБу ,ПЩвдТњзуДѓЖрЪ§Ъ§ПиЛњДВЕФвЊЧѓ ,ЬиБ№ЪЪгУгкЮвЙњЙњЧщКЭДѓХњСПЕФЪ§ПиЛњДВ ЛњЕчСЊЕїЕФашвЊЁЃЯждкЕФЪ§ПиЯЕЭГЖМВЩгУШэМўНјааТнОрВЙГЅ , НЋИї ЕуЕФВЙГЅСПДцШыЯЕЭГЕФДцДЂЦїжа ,Ъ§ПиЯЕЭГдкдЫааЕФ Й§ГЬжаПЩвдЖдИїЕузјБъЮЛжУздЖЏНјааВЙГЅЁЃЗжЮіШэМўВЙГЅдРэ ,еЦЮеОпЬхЕїећЗНЗЈ ,е§ШЗЩшЖЈВЙГЅСП ,Жд Ъ§ПиЛњДВЕФЪЙгУКЭЮЌЛЄЗЧГЃживЊЁЃ
[зЪСЯРДдДЃКhttps://www.doc163.com]
[ЙиМќДЪ]Ъ§ПиЯЕЭГЃЛ PIDЕїНкЃЛЮЛжУПижЦЦїМАЦфВЙГЅзАжУЁЃ
Step-by-step closed cycle servosystem pitch of screw error analysis and compensates the device design
AbstractЃКThe numerical control technology and the numerical control equipment are the factory industry modernization important bases. Does this foundation whether reliable immediate influence to a country's economic development and the comprehensive national strength, relate to a national strategic position. Therefore, in the world the various industrially advanced country takes the important step to develop own numerical control technology and the industry. In our country, the numerical control technology and the equipment development also obtained has taken seriously, in recent years has made the quite big progress. Specially in the general microcomputer numerical control domain, take the PC platform as the foundation domestically produced numerical control system, already walked in the world leader. But, our country also has many problems in the numerical control engineering research and the industrial development aspect, specially in aspect situation outstandinglies and so on technological innovation ability, commercialized advancement, market share. When new century arrival, how do effective addressing these questions, cause our country numerical control domain along the sustainable development path, overall enters into the world advanced ranks comprehensively, enables us to have the pivotal status in the international competition, will be the important task which the numerical control research development department and the Manufacturer face. In order to complete this task, must first establish conforms to the Chinese national condition development path. Therefore, this article from the overall strategy and the technical route two levels and the numerical control system, the functional unit, the numerical control complete machine and so on several concrete aspects has discussed the new century development approach..
The numerical control technology is mechanical technical organic synthesis and so on electronic accounting machine and automatic control high technology and new technologies, has widely applied in the machine manufacture domain, causes the technique of manufacture to develop to the high speed automation high purification integration intellectualization network direction, causes the engineering products to develop in the performance to the high accuracy high efficiency high performance intellectualization direction, develops in the function to the miniaturized light multi-purpose direction, develops in the level to the systematized set integration direction. The expert predicted that in the future the manufacturing industry competition will be the numerical control technology competition to a great extent.
In order to cause the undergraduate student graduate student to study the research numerical control technology, causes the researcher and the laboratory technician understands and grasps the numerical control link and the numerical control process fully. Our school depends on the Shanxi Province numerical control technology and the industrial automation key laboratory, has reported the numerical control test platform development scientific research item. This test platform advantage employing labor controls machine and the movement controller carries on the control to the XYZAB five coordinates, uses the displacement detector set to carry on the survey to the numerical control installment execution displacement. The coordinate control information examination information uses the microcomputer CRT large screen display. The entire test platform system uses the open style module type structure, the researcher may according to need to carry on the expansion to the system. Obviously, this experiment has the very strong operationality, studies the numerical control technology curriculum essential test installation. ЁМзЪСЯЮЈвЛЭјжЗЃКБЯвЕЩшМЦ(ТлЮФ)Эј HTTP://www.wenku163.comЁН [зЪСЯРДдДЃКhttps://www.doc163.com]
In the numerically-controlled machine tool, the server is the numerically-controlled machine tool installment and engine bed's zonula adherens link, is the numerical control system's important component. The server accepts from the servo controller's to feed pulse, transforms after the transformation and the enlargement into platen's displacement, causes the work table to follow the command pulse migration.
After numerically-controlled machine tool long-term movement, transmission system's reverse gap and the pitch error are relatively prominent to position error's influence, because the machinery wears, causes the guide screw pitch error to increase, the working accuracy cannot obtain the guarantee. But in enterprise's majority numerically-controlled machine tool revolves in the ultra performance and under the ultra bearing capacity condition, examines engine bed's error and the prompt adjustment reverse gap, the pitch regularly and so on can improve the engine bed precision earnestly, the improvement components processing quality. Therefore, the enterprise must carry on a time guide screw pitch error compensation once in a while the adjustment, this regarding increases engine bed's working accuracy to be essential. The laser interferometer is very high to error's measuring accuracy, but the price is expensive, needs the specialist to operate, is not suitable in produces under the scene environment to work. The step pitch gauging quantity manufacture is simple, the ease of operation, may satisfy the majority numerically-controlled machine tool's request, is suitable specially for our country national condition and the mass numerically-controlled machine tool mechanical and electrical jointing shake down testing need. Present's numerical control system uses the software to carry on the pitch compensation, stores in system's memory each spot compensation quantity, the numerical control system may carry on the compensation automatically in the movement process to each coordinate position. The analysis software compensation principle, masters the concrete regulation means that establishes the compensation quantity correctly, and maintains to numerically-controlled machine tool's use is important. [РДдДЃКhttp://www.doc163.com]
Key wordsЃКCNC SystemЃЛPID regulatorЃЛPosition controller and the compensation device
БЯвЕТлЮФЩшМЦЕФФкШнвЊЧѓ
ИљОнЮЛжУЫХЗўЯЕЭГдкЛњДВЩЯЕФгІгУЃЌбаОПЮЛжУЫХЗўЯЕЭГЕФНсЙЙЬиЕуЃЌЮЛжУЫХЗўЯЕЭГЕФЮѓВюЖдЛњДВМгЙЄОЋЖШгАЯьЁЃБОПЮЬтРћгУЛњаЕбЇдКЪ§ПиЪдбщЬЈЃЌЭЈЙ§ЙтеЄДЋИаЦїВтСПЮЛжУЮѓВюЃЌбаОПгАЯьЮЛжУЫХЗўЯЕЭГЮѓВюЕФвђЫиЃЌгУMATLABШэМўЗжЮіЮѓВюЗжВМЃЌевГіЮѓВюгыдЫЖЏжЎМфЕФЙцТЩЃЌЩшМЦЮЛжУПижЦЦївдМАЮѓВюВЙГЅзАжУЃЌЪЙЮЛжУЯЕЭГЕФдЫЖЏОЋЖШДяЕНвЊЧѓЁЃ
ОпЬхШЮЮёШчЯТЃК
ЃЈ1ЃЉ СЫНтБОПЮЬтФПЧАгаЙиЧщПіЃЌЭъГЩПЌЬхБЈИцКЭгЂЮФЗвыЁЃ
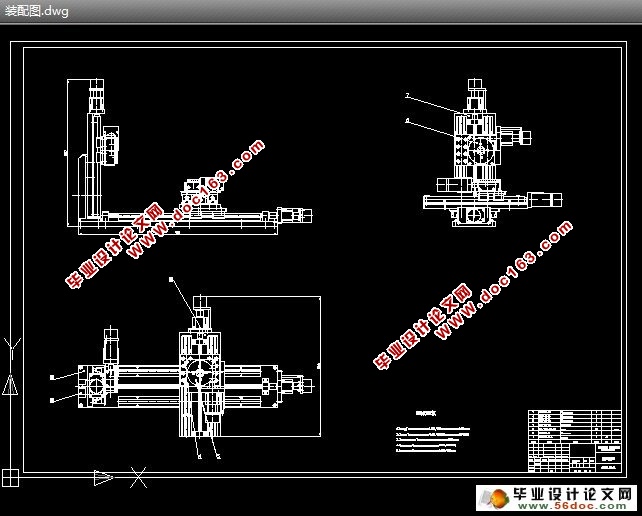
ЃЈ2ЃЉ ЪьЯЄЛњаЕбЇдКЪ§ПиЪдбщЬЈЕФНсЙЙКЭПижЦЯЕЭГЃЌЛцжЦЪ§ПиЪдбщЬЈНсЙЙЭМКЭПижЦЯЕЭГдРэЭМИї1еХЃЌA0ЁЃ
ЃЈ3ЃЉ ВтСПТнОрЮѓВюЃЌевГіЮѓВюЙцТЩЁЃЛцжЦЮѓВюЗжВМЭМ1еХЃЌA3ЁЃ
ЃЈ4ЃЉ ЩшМЦМАЮѓВюВЙГЅзАжУЃЌЛцжЦВЙГЅзАжУЭМ1еХЃЌA1ЁЃ
ЃЈ5ЃЉ БраДЩшМЦЫЕУїЪщ1ЗнЃЌИёЪНКЭзжЪ§ТњзубЇдКвЊЧѓЁЃ
змЬхНщЩм
2.1 жївЊММЪѕВЮЪ§
ЯЕЭГДяЕНЕФММЪѕжИБъЮЊЃКТіГхЕБСП0.01mmЃЌЖрзјБъСЊЖЏПижЦЃЌааГЬ400mmЃЌзюДѓвЦЖЏЫйЖШ2m/minЁЃТнОрP=5mmЁЃ [РДдДЃКhttp://www.doc163.com]
ШЗЖЈZЯђааГЬ400mmЃЌXЁЂYЯђааГЬ200mmЃЛBЁЂCСНИізЊЖЏжсУПТіГхзЊНЧВЛДѓгк5ЗжЁЃ
ZЯђВЩгУЙтеЄВтСПЮЛвЦЃЌЗжБцТЪЮЊ0.05mmЃЛXЁЂYЁЂZЁЂBЁЂCЯђЕчЛњжсЩЯзАБрТыЦїЃЌЗжБцТЪВЛДѓгк5ЗжЁЃ
2.2 змЬхВМОж
ЪдбщЬЈзмЬхВМОжШчЭМ1.1ЫљЪОЁЃ
2.3 ПижЦаЮЪН
XЁЂYЁЂBЁЂCЯђВЩгУАыБеЛЗПижЦЃЛZЯђМДПЩВЩгУБеЛЗПижЦЃЌвВПЩВЩгУАыБеЛЗПижЦЁЃ
2.4 Ъ§ПизАжУ
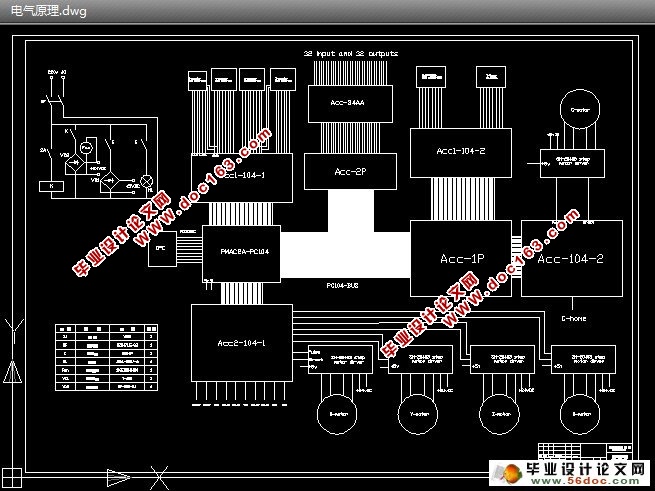
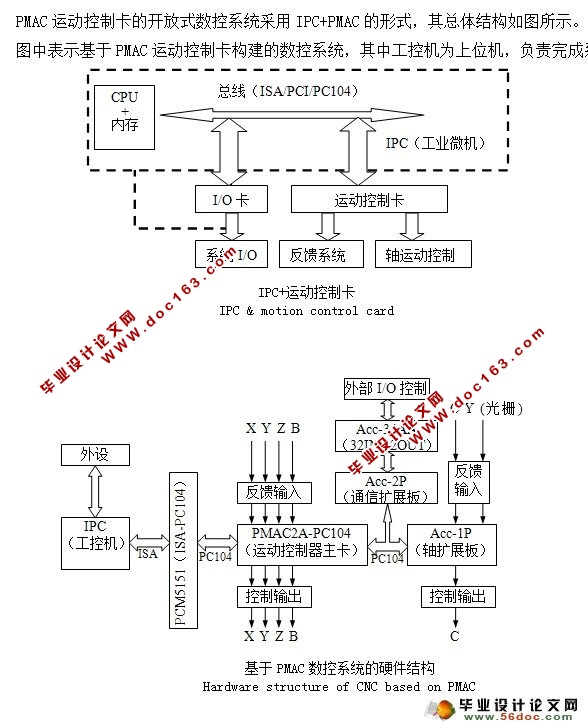
Ъ§ПизАжУВЩгУЙЄПиЛњЃЈIPCЃЉ+дЫЖЏПижЦЦїЃЈPMACЃЉ
[зЪСЯРДдДЃКhttps://www.doc163.com]
ФПТМ
1 аїТл 2
1.1Ъ§ПиММЪѕЕФЗЂеЙЯжзДКЭЗЂеЙЧїЪЦ 2
[зЪСЯРДдДЃКDoc163.com]
1.2БЯвЕТлЮФЩшМЦЕФФкШнвЊЧѓ 3
2 змЬхНщЩм 4
2.1 жївЊММЪѕВЮЪ§ 4
2.2 змЬхВМОж 4
2.3 ПижЦаЮЪН 4
2.4 Ъ§ПизАжУ 4
3 ЛњаЕВПЗжНщЩм 5
3.1 ЛЌЬЈ 5
3.1.1 ЕМЙь 5
3.1.2 ЫПИм 6
3.1.3 ЕчЛњ 8
3.2 зЊЬЈ 8
3.2.1зЊЬЈЕчЛњ 8
3.3 МьВтдЊМў 9
3.3.1 ЙтеЄ 9
3.3.2 БрТыЦї 9
4 ЭЈгУдЫЖЏПижЦЦїПижЦЯЕЭГЕФНщЩм 10
4.1 дЫЖЏПижЦЦїИХЪі 11
4.1.1 дЫЖЏПижЦЦїЕФЙЙГЩ 11
4.1.2 дЫЖЏПижЦЦїЕФЬиЕу 12
4.1.3ЭЈгУдЫЖЏПижЦММЪѕМАдЫЖЏПижЦЦїЕФЗЂеЙ 13
4.2 PMACдЫЖЏПижЦПЈ 16
4.2.1 PMACдЫЖЏПижЦПЈНщЩм 16
4.2.2 PMACдЫЖЏПижЦПЈгІгУ 17
5ЛљгкPMACдЫЖЏПижЦПЈЙЙНЈЪ§ПиЯЕЭГ 18
5.1ЯЕЭГгВМўзщГЩ 18
5.1.1 ЙЄПиЛњЃЈIPCЃЉ 19
5.1.2 PMAC2A-PC104дЫЖЏПижЦПЈзщ 20
5.1.3 I/OАх 20
5.1.4 гВМўПижЦЯЕЭГЕФНсЙЙ 21
5.2 ЯЕЭГШэМўНсЙЙ 21
5.2.1 ИХЪі 21
5.2.2 ЯЕЭГПижЦШэМў 22
6Ъ§ПиММЪѕЪдбщЬЈ 25
6.1 Ъ§ПиММЪѕЪдбщЬЈзмЬхНсЙЙ 25
6.2 ЛњаЕБОЬх 25
6.3 ЫХЗўЧ§ЖЏЯЕЭГ 27
6.4 ЗДРЁМьВтзАжУ 28
7 Ъ§ПиММЪѕЪдбщЬЈТнОрЮѓВюЪдбщ 30
7.1 ЪдбщЬЈТнОрЮѓВюВЙГЅ 30
7.2ТнОрЮѓВюВЙГЅдвђ 30
7.3ТнОрЮѓВюЕФВЙГЅдРэ 30
7.4ТнОрЮѓВюВтСПЪЕбщВНжш 35
жТ аЛ 37
ВЮПМЮФЯз 38
ИНТМ 41 [зЪСЯРДдДЃКhttps://www.doc163.com]
[АцШЈЫљгаЃКhttp://DOC163.com]
ЩЯвЛЦЊЃКздЖЏЗРЕСУХПЊЫјЛњЙЙ(ЛњаЕЪж)ЩшМЦ
ЯТвЛЦЊЃКШШХЬМгЙЄзЈгУЛњДВЩшМЦ