
主动悬架系统的行驶状态自适应控制

资料介绍:
主动悬架系统的行驶状态自适应控制(中文4800字,英文PDF)
Guido Koch和Tobias Kloiber
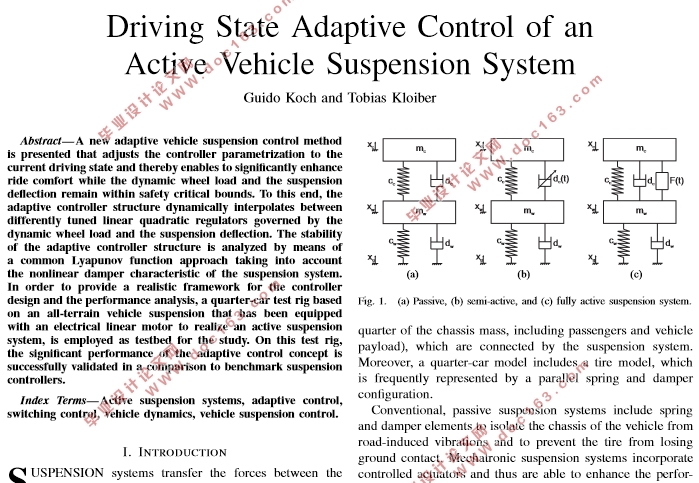
摘要:本文提出了一种新的自适应车辆悬架控制方案,该方案实现控制器参数化来适应当前的驾驶状态,从而能够显着提高乘坐舒适性,同时,动态车轮载荷和悬架偏转保持在安全临界范围内。为此,自适应控制器结构在由动态车轮负载和悬架偏转所支配的不同调谐的线性二次调节器之间动态插值。考虑到悬架系统的非线性阻尼特性,通过普遍的Lyapunov函数法分析了自适应控制器结构的稳定性。为了给控制器设计和性能分析提供一个真实的框架,基于全地形车辆悬架的四分之一车的试验台采用电动直线电机来进行主动悬架系统试验台的测试。在这个测试平台上,通过自适应控制概念的显着性能与基准悬架控制器的比较,成功验证了方案。
关键词 : 主动悬架系统,自适应控制,开关控制,车辆动力学,车辆悬架控制
[资料来源:https://www.doc163.com]
[版权所有:http://DOC163.com]