
电动液压助力转向系统设计(含CAD零件图装配图)

电动液压助力转向系统设计(含CAD零件图装配图)(任务书,开题报告,文献摘要,外文翻译,论文说明书14000字,CAD图6张)
摘要
本设计的对像是电动液压助力转向系统,它是未来转向系统发展方向的一个分支,将与电动助力转向系统慢慢取代传统的液压式助力转向系统。
设计内容主要包括两部分,分别为转向机械部分的设计和转向助力部分的设计,转向机械部分的设计内容为转向器的设计和转向梯形的设计,转向助力部分的设计内容为电动液压泵的三维建模。转向器的设计按照常规设计流程进行,转向梯形先确定布置形式,确定初步参数,再建立内外转向轮转角的理想的转向特性曲线的函数和实际的转向特性曲线的函数,然后在转向梯形参数选择时利用Matlab软件设计程序进行计算,求出最佳参数。转向助力装置选择布置形式,确定转向阀结构方案,计算动力缸参数,再根据实物利用catia软件对液压泵进行设计和三维建模。
关键字:电动液压助力转向; 助力转向; 转向系统; 齿轮齿条;转向梯形
Abstract
The paper is the design of the electric hydraulic power steering system, it is a branch of the future direction of the development of the system, and with the electric power steering system slowly replace the traditional hydraulic power steering system. [版权所有:http://DOC163.com]
Design content mainly includes two parts, respectively for steering mechanical part design and the design of steering booster parts, the design content of the steering machine part is the design of the steering gear and the design of the steering trapezoid,the design content of the steering power part is three dimensional modeling of the electric hydraulic pump.The design of the steering gear is carried out according to the conventional design process,steering trapezoid first determine the layout of the form, and the parameter, then while determining the parameters of steering trapezoid, using Matlab software design program to calculate the parameters of steering trapezoid. Steering power device to choose the form of arrangement, determine the structure of the steering valve program, calculate the power cylinder parameters, and then according to the physical use of CATIA software to design and three-dimensional modeling of the hydraulic pump.
Key words:Electric hydraulic power steering; Power steering; steering system; Rack and pinion; Steering trapezoid [来源:http://www.doc163.com]
论文的主要内容
本设计的主要内容可以分为转向系统机械部分的设计和助力部分的设计两个部分。机械部分主要进行转向器的设计和转向梯形的设计,动力部分主要进行齿轮泵的三维建模。
机械部分的设计:对转向器进行常规的选型和计算,对转向梯形利用Matlab软件编程,进行近似设计。
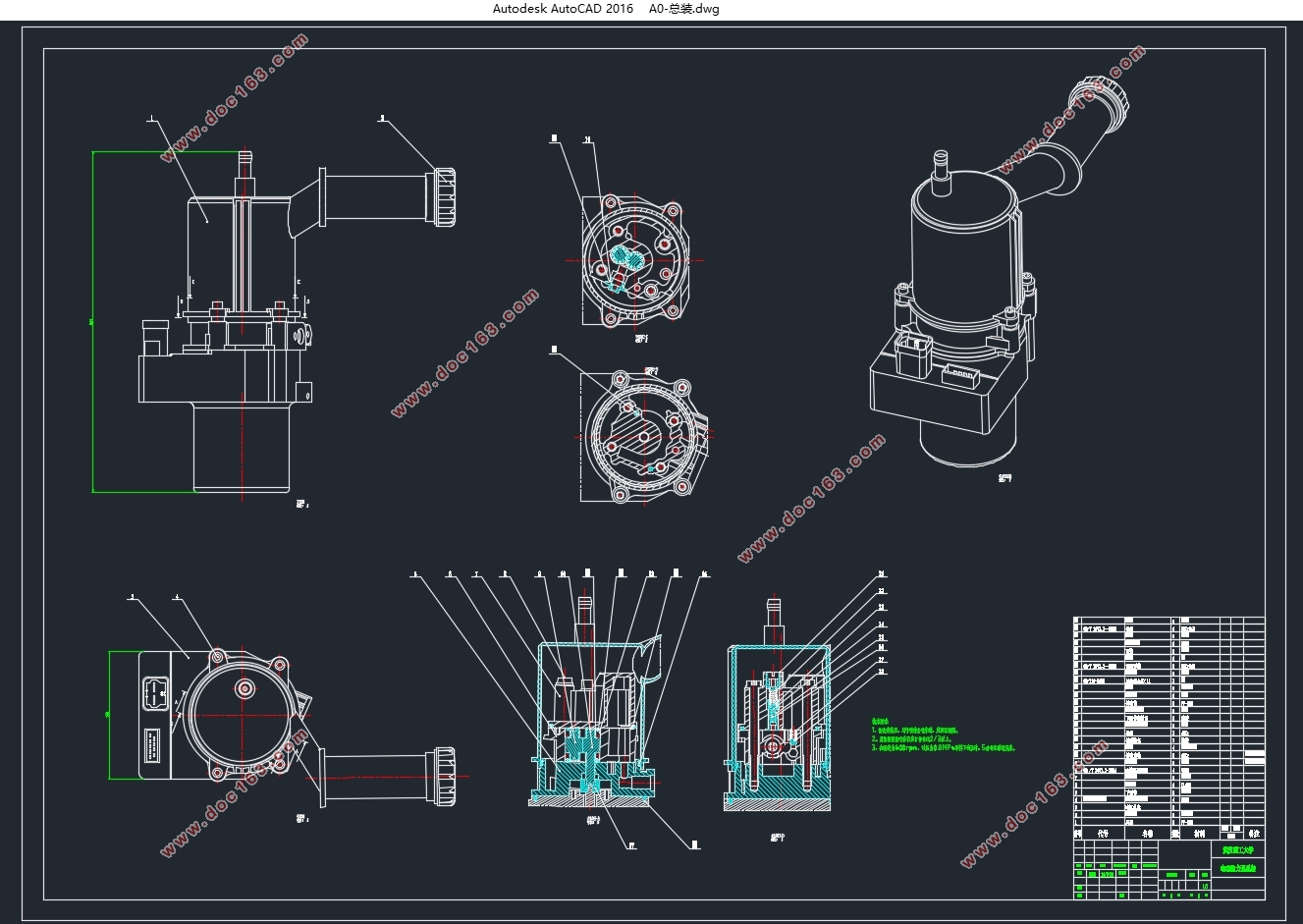
转向助力机构设计:对助力机构的布置进行选择,对动力缸主要参数进行计算。然后参考实物绘制电动助力泵的三维模型。
1.4转向系统的设计要求
转向系统的设计要保证汽车的机动性能,在转弯时,能快速改变行驶方向,转弯的半径尽量要小。因此,我们应使转向轮的转角尽量大,并要使其达到汽车在最小转弯半径情况下转向时,前轮外侧车轮的行驶轨迹的半径为汽车轴距的2~2.5倍。转向时转向轮要围绕同一个中心旋转,操纵轻便。即当转向时需要我们对方向盘所施加的力不能太大,需要转动方向盘的圈数不能太多[1]。在汽车运行时,转向传动机构和悬架导向机构的运行不会影响到转向轮。
1.5转向助力系统的设计要求
在给汽车装上转向助力机构之后,为了保证原车的转向性能,对其有如下要求:
1.转向助力系统的工作要安全可靠。
2.转向助力系统应有随动作用。
3.要良好的“路感”,转向助力系统不能阻断方向盘所受到的反力。
4.转向助力系统要保证转向系统依旧存在自动回正的功能。
1.6设计参数
轿车相关参数已由老师如下:
轴距(mm)2750 最高车速(km/h)170 整备质量(kg)1370 总质量(kg)1780 前轴负荷(kg)885 后轴负荷(kg)895 发动机最大功率(kw/rpm)101/5600 发动机最大扭矩(N•m/rpm)186/3600-4000 轮胎规格215/60 R17 接近/离去角 20\25
[来源:http://Doc163.com]

目 录
摘要 I
Abstract II
第1章 绪论 1
1.1汽车转向系统概述 1
1.2转向系统的国内外发展趋势 1
1.3论文的目的和主要内容 1
1.3.1论文的目的 1
1.3.2论文的主要内容 2
1.4转向系统的设计要求 2
1.5转向助力系统的设计要求 3
1.6设计参数 3
第2章 转向系统机械部分设计 3
2.1转向器的选择 3
2.2齿轮齿条式转向器的方案设计 4
2.2.1输入输出形式选择 4
2.2.2齿轮齿条形式选择 4
2.2.3齿轮齿条的布置形式 4
2.3转向器的设计计算 5
2.3.1转向轮侧偏角计算 5
2.3.2齿轮齿条参数选取与计算 6
2.3.3转向轴的结构设计 9
2.3.4转向器材料和其他零件选择 9
2.4 转向器校核 10
2.4.1齿条受力分析 10
2.4.2齿轮强度分析计算 11
2.4.3齿轮轴强度分析计算 13
2.5 转向梯形选择 16
2.6 整体式转向梯形参数初步确定 16 [资料来源:Doc163.com]
2.7 转向梯形几何关系分析 16
2.8利用matlab对转向梯形进行设计 18
2.8.1建立分析函数 19
2.8.2确定最优化参数 20
2.9转向传动机构部件设计 23
2.10 机械部分设计小结 23
第3章 转向助力机构设计 24
3.1电动液压助力介绍 24
3.2转向助力机构的布置 24
3.3液压传动的计算 26
3.3.1动力缸主要尺寸计算 26
3.3.2转向阀参数选择 27
3.4 液压泵三维建模 28
3.4.1 齿轮的绘制 29
3.4.2 泵体的绘制 30
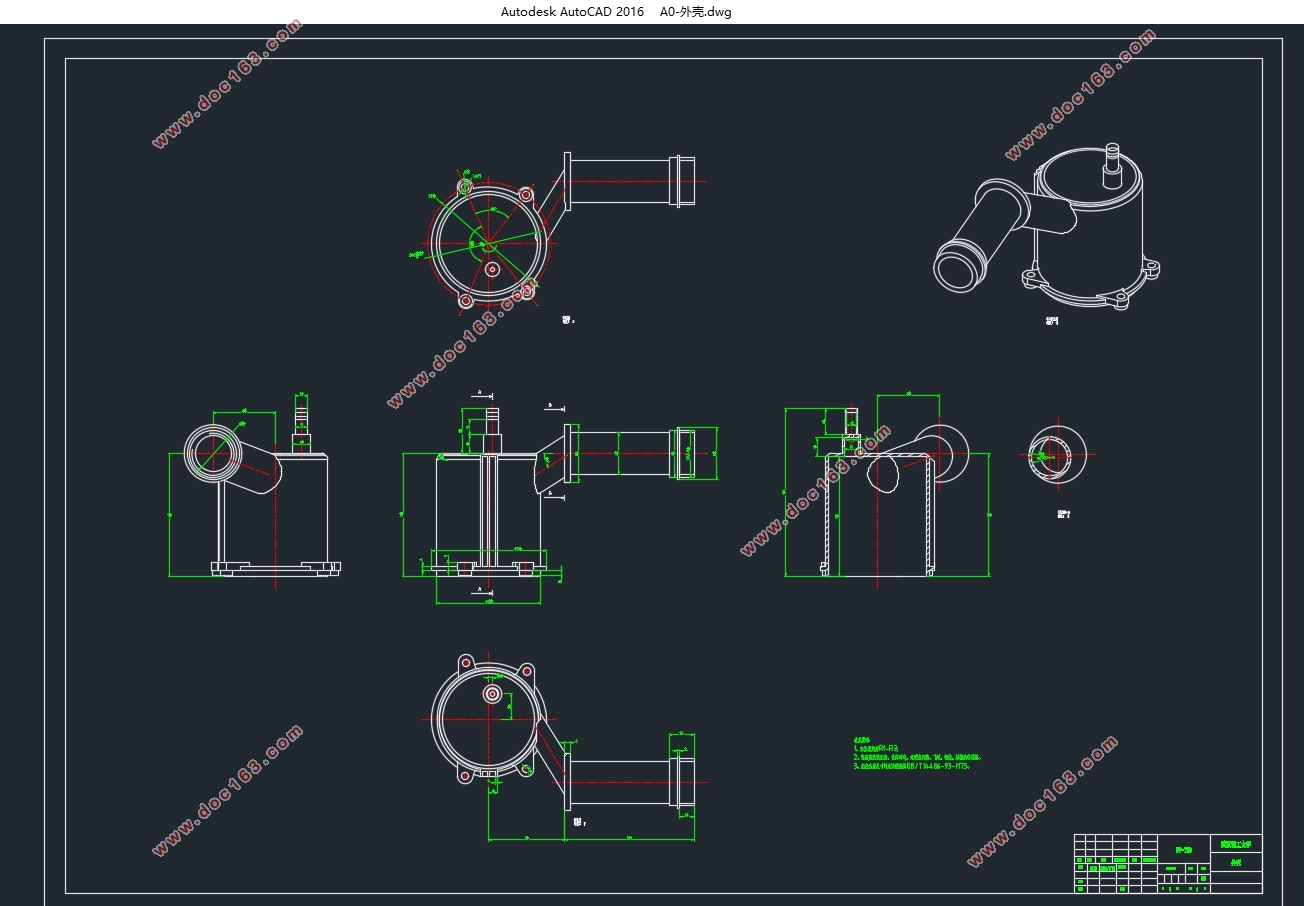
3.4.3 外壳与电机总成的绘制 34
3.5 转向助力设计小结 35
第4章 结论 36
参考文献 37
附录A 转向梯形计算时所编写的matlab程序 38
致谢 40
[来源:http://Doc163.com]
上一篇:爱丽舍7164型轿车转向系(液压助力)设计(含CAD图,CAXA图,SolidWorks三维图)
下一篇:汽车电子液压制动系统及试验台架设计(含CAD零件图装配图,CATIA三维图)