
工业机械人自动浇铸机械手设计(三维Proe)☆

摘 要
本文简要介绍了工业机械人的概念,浇铸机械手的组成,机械手的各个部件的整体尺寸设计。本文着重对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。同时,设计了机械手的手部结构,设计了机械手的手腕结构,计算了手腕转动时所需的驱动力矩和回转液压缸的驱动力矩。设计了机械手的手臂结构。设计出了机械手的液压系统,绘制了机械手液压系统工作原理图,大大提高了绘图效率和图纸质量。
关键词:工业机械人 机械手 浇铸机械手
Abstract
At first, the paper introduces the conception of the industrial robot and the Eller. Dairy information of the development brief. What is more, the paper accounts for the background and the primary mission of the topic. The paper introduces the function composing and classification of the manipulator, tells out the free-degree and the form of coordinate. At the same time, the paper gives out the primary specification parameter of this manipulator. The paper designs the structure of the hand and the equipment of the drive of the manipulator. This paper designs the structure of the wrist, computes the needed moment of the drive when the wrist wheels and the moment of the drive of the pump. The paper designs the structure of the arm.
KeyWords:industrial robot manipulator pump air pressure drive
1.1.3 手部设计要求
1.手部应有足够的夹紧力。除工件的重力外,还要能不使工件在传送过程中松动或脱落;
2.夹持范围要与工件相适应。手爪的开闭角度(手爪张开或闭合时两个极限位置所摆动的角度)应能适应夹紧较大的直径范围;
3.夹持精度要高。既要求工件在手爪内定位准确,又不夹坏工件表面。一般需根据工件的形状选扦相应的手爪结构:如圆柱形工件应采用带v形槽的手爪来定位;对于工件表面光洁度较高的,应在手爪上镶铜、夹布胶木或其他软质垫片等
4.夹持动作要迅速、灵活;
5.手部结构耍简单紧凑、刚性好、自重轻、易磨损处应便于更换在腕部或臂部上安装要方便,更换要迅速。
1.2机械手的组成
机械手主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度 。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机 械手设计的关 键参数。自由 度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有2~3个自由度。控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的核心通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。
工业机械于的结构有简单的也有复杂的。但从结构形式分析,主要有执行机构驱动系统、位置检测装置和控制系统等组成。
总体技术方案及系统组成
2.1 原始数据
用途:用于冷室压铸机浇铸铝合金溶液。
规格参数:
浇包最大容量: 8公斤
自由度数: 3个
坐标形式: 类似球坐标
手臂运动参数:
回转(&): 110 ° [资料来源:http://doc163.com]
俯仰(θ): 54°
浇包最大倾斜角(θ1): 70°
驱动方式: 液压
控制方式: 继电器固定程序控制 [版权所有:http://DOC163.com]



目 录 19000字
摘 要 I
Abstract II
1绪论 1
1.1机械手的分类 2
1.2机械手的组成 4
1.3应用机械手的意义 6
1.4用机械手的历史 7
2 总体技术方案及系统组成 8
2.1 原始数据 8
2.2 工作需要 9
2.3 工作结构 10
2.4 动作分析 10
2.5总体技术方案 11
3 手部机构设计 12
3.1 手部机构设计要求 12
3.2手部结构分类 12
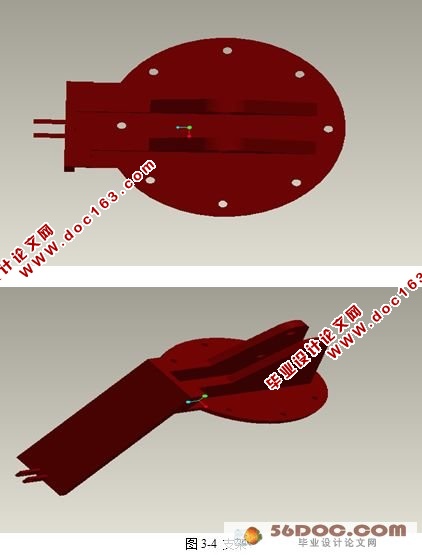
3.3自动浇铸机械手结构设计 14
[资料来源:https://www.doc163.com]
3.4升降液压缸的支撑架设计 18
4 手腕的结构设计 20
4.1 腕部总体设计 20
4.2腕部的设计要求 20
4.3腕部的结构尺寸 21
4.4手臂倾倒液压缸的设计 24
5 手臂和机身的尺寸设计及校核 29
5.1 臂部和机身的简介 29
5.2臂部设计的基本要求 30
5.3手臂的尺寸设计 30
5.4 手臂的尺寸校核 32
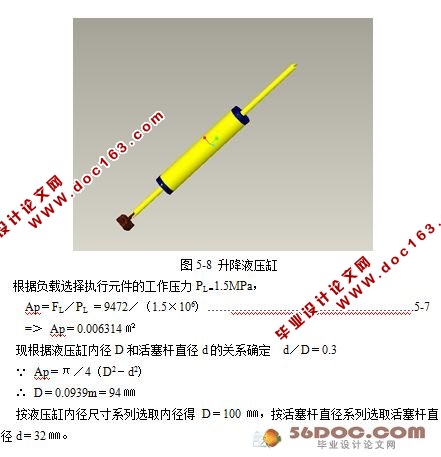
5.5 手臂升降液压缸的设计 33
5.6 液压缸内径D和活塞杆直径d的确定 35
5.7液压缸壁厚和外径的计算 36
5.8手臂升降液压缸的校核 37
6 腰部与底座及回转液压缸的设计 38
6.1 底座的设计 38
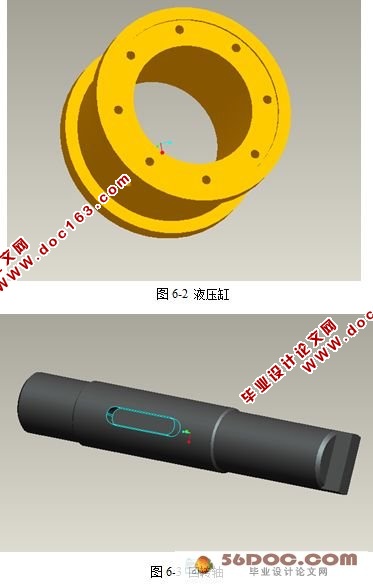
6.2 回转液压缸的设计 38
6.3 回转液压缸的尺寸设计 39
6.4 回转液压缸的尺寸校核 41 [资料来源:http://Doc163.com]
6.5 回转轴的设计 42
6.6 上轴的设计 43
6.7上轴座的设计 44
结 论 46
参考文献 47
致 谢 48
[来源:http://Doc163.com]
上一篇:小型电动移动式喷雾机设计