
连续退火炉炉底辊辊环自动焊接机器人设计(含CAD图,SolidWorks三维图)
连续退火炉炉底辊辊环自动焊接机器人设计(含CAD图,SolidWorks三维图)(任务书,开题报告,外文翻译,论文说明书13000字,CAD图6张,SolidWorks三维图)
摘要
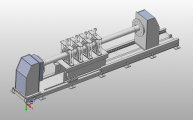
焊接在我国制造工业领域有着至关重要的作用。作为目前最广泛应用的材料连接方法,在机械制造、航空航天、桥梁建筑、电子产品生产等行业中得到了越来越普遍的应用。但随着我国科学技术的不断发展进步,我国制造工业的各个领域对于焊接质量的要求越来越高,传统的手工焊接显然已经满足不了当今工业生产的技术要求。采用焊接机器人替代人工焊接以实现自动化焊接成为当前焊接领域的趋势。实现优质稳定且高效的焊接是应用焊接机器人的意义所在。连续退火炉的炉底辊质量是影响带钢退火作业和产品表面质量的重要因素,炉底辊属焊接件,且因其工作环境恶劣,极易损坏,消耗量极大,传统上由手工电弧焊作业。但分瓣式辊环由六个相同子块组成,使得手工作业工作量极大。本文就解决目前炉底辊手工焊接的困难,设计一炉底辊自动焊接机器人工作站,主要对其总体布局、单轴变位机以及工装夹具进行结构设计并进行三维建模,以及部分结构的相关计算,并对周向焊接过程进行仿真,以实现自动化焊接,解决当前困难。
关键词:焊接机器人工作站;辊环;自动化焊接;三维建模
[资料来源:Doc163.com]
Abstact
Welding is of vital importance in our country's manufacturing industry.As the most widely used material connection method, it has been widely used in mechanical manufacturing, aerospace, bridge construction, electronic product production and other industries.But with the continuous development of science and technology progress in China, The requirements of welding quality are higher and higher in various fields of manufacturing industry in China, traditional manual welding has obviously not met the technical requirements of today's industrial production.Welding robot is used to replace manual welding for achieving automatic welding has become the trend of welding field.To achieve high quality and stable and efficient welding is the significance of welding robot.The quality of furnace bottom roller of continuous annealing furnace is an important factor affecting the annealing operation and surface quality of the strip and because of its poor working environment, it is extremely easy to be damaged, and the consumption is very large.It is traditionally operated by manual arc welding.However, the split roller ring consists of six identical sub-blocks, which makes the manual work load greatly.In this paper, the problem of manual welding of bottom roller is solved by designing the automatic welding robot workstation of bottom roller,mainly making the structure design and 3d modeling of its overall layout, uniaxial displacement machine and fixture are designed and the calculation of some structures,and simulating the welding process of circumferential welding in order to realize automatic welding and solve the current difficulties.
[资料来源:http://doc163.com]
Keywords: welding robot workstation; Roller ring; Automatic welding; 3d modeling
焊接机器人工作站简介
焊接机器人工作站指的是以使用一台或者多台焊接用机器人为主,在配以相关的周边设备来完成预期的焊接工作一套组合设备。完整的机器人焊接工作站主要包括一下几个部分:焊接电源、焊接机器人、示教器、送丝机、焊接机器人控制柜、工作台、丝盘箱、变位机及夹具等。另外还有一些附属设备用于整理工作站的环境,如烟尘净化器、安全设备、和焊枪清理设备等等。机器人要完成焊接作业,必须依赖于这些设备的支持和配合,才能达到预期的焊接效果。
[资料来源:http://doc163.com]



 [资料来源:http://Doc163.com]
[资料来源:http://Doc163.com] 


目录
摘要 I
Abstact II
第1章 绪论 1
1.1选题的目的及意义 1
1.2国内外研究现状 1
1.3设计基本内容和目标 2
[资料来源:http://doc163.com]
第2章 工作站总体设计 3
2.1焊接机器人工作站简介 3
2.2焊接机器人工作站总体要求 3
2.3焊接机器人工作站部件选型 3
2.3.1焊接机器人选型 3
2.3.2机器人控制器选择 4
2.3.3送丝机及丝箱盘的选择 5
2.3.4安全设施选择 5
2.3.5清枪机构选择 5
2.4焊接机器人工作站总体布局 6
第3章 焊接单轴变位机设计 8
3.1变位机结构形式选择 8
3.2变位机应具备的性能 9
3.3变位机传动设计 9
3.3.1传动方案选择 9
3.3.2电动机的选择 10
3.3.3齿轮传动设计 11
3.4变位机总体结构设计 13
3.4.1主动前架设计 14
3.4.2底座设计 14
3.4.3从动后架设计 15
3.5变位机典型机械结构部件设计 16
[资料来源:http://doc163.com]
3.5.1工作台设计 16
3.5.2轴向定位器设计 16
3.5.3辊筒夹具设计 17
3.5.4从动后架底座设计 18
第4章 辊环夹具设计 19
4.1零件图分析 19
4.2定位方式选择 20
4.3夹紧方式选择 20
4.4辊环夹具总体设计 21
4.4.1辊环容器设计 21
4.4.2定位装置设计 22
4.4.3夹紧装置设计 23
4.4.4夹具总装 23
4.5辊环夹具及焊接变位机总体装配 24
第5章 焊接机器人运动仿真 25
5.1仿真软件简介 25
5.2机器人焊接路径的创建 25
5.3碰撞检测 26
第6章 总结 28
参考文献 29
致谢 30
[资料来源:Doc163.com]
上一篇:主轴部件支承特性试验台总体方案及轴向加载系统设计(含CAD图)
下一篇:斜齿圆柱齿轮参数的计算机辅助设计