
手动机器人机械部分设计(含CAD零件图和装配图)

手动机器人机械部分设计(选题审批表,任务书,开题报告,中期检查表,论文说明书13600字,CAD图6张)
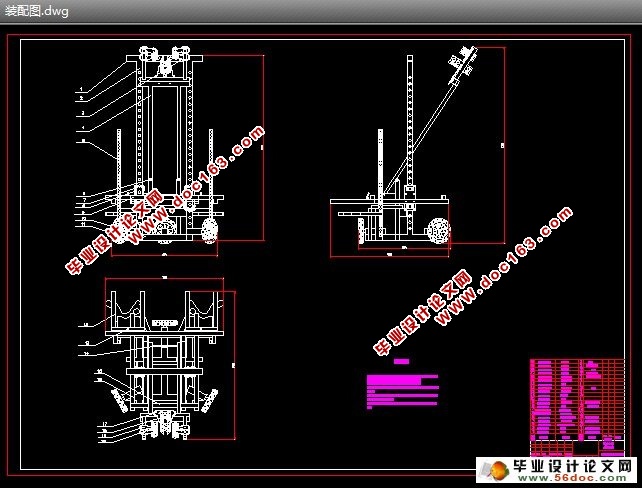
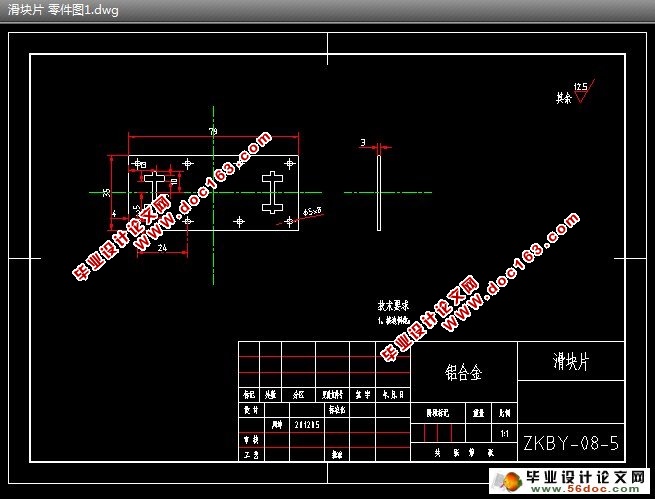
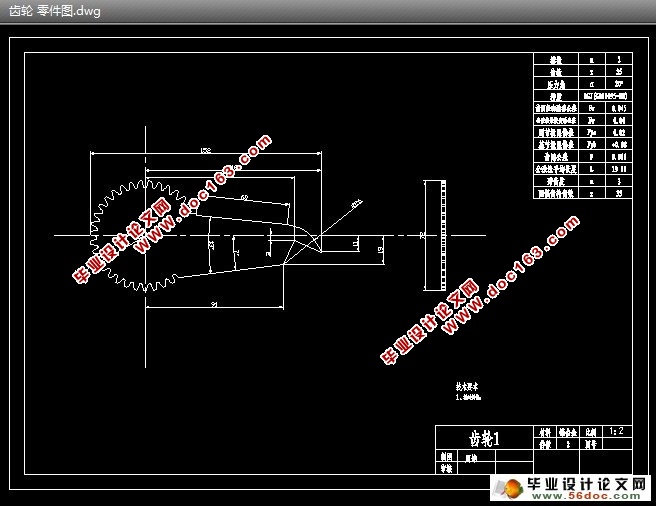
摘 要:该设计主要是针对第十届全国机器人大赛比赛要求设计,具有手动和自动的搬运固定物体的能力,有着快速升降与抓取以及精确定位的特点。大体分为机械部分和电子制控部分。机身采用铝合金框架结构,使用三角全向轮作为底盘,该底盘有着灵活移动的特点;升降结构采用同步带传动的直线滑块机构;抓取机构采用齿轮传动。
关键词:铝合金;全向轮;齿轮;
Mechanical Design of Manual Control Robot
Abstract: The design is directed to rules of Tenth National Robotics Competition, which has manual operation and automatic operation. It Has a fast and precise positioning movements and accurate location.This robot roughly decompose mechanical parts and electronics parts. Aluminum cover all robot.Chassis use triangle and centered orientablewheel.This chassis have flexible features;Lifting mechanism use wieldbar of gearwheel transfer power; Crawl use Hinge transfer power.
Keywords: aluminum; mecanum; gearwheel [资料来源:www.doc163.com]
设计的研究内容与意义
机器人大赛是对我们当代大学生一次很好的磨练机会。机器人的设计涉及到十余门专业科目,很大一部分知识是在课堂上无法学到的,这需要我们从课外书本和网络上获取相关技术,对培养我们的自学能力有很大的促进作用。从理论分析到实体加工需要不同专业学生共同完成,这也大大提高了同学们团队合作意识为今后走向社会奠定了基础。
本课题研究的主要内容就是如何对本届手动机器人机械部分设计。大体可细化为以下几个方面:
1)机器人的总体设计:根据规定的题目进行合理的分析,分析各个需要完成的动作,设计出合理的机构,包括稳定的底盘,旋转机构、机身、机械手等。要保证机器人移动的稳定性、移动精度和移动方向设计了机器人专用的三轮底盘。三轮底盘具有全向移动、稳定性好。需要攻克的难点是三轮底盘的精度问题
2)电机的选择:为了提高工作效率,需要电机高速运行并快速启停时,必须考虑它的升、降速控制问题。电机的工作性能直接影响机器人的定位精度、速度和响应能力,因此,采用高性能的直流伺服电机具有重要意义。直流伺服电机具有:体积小、动作快反应快、过载能力大、调速范围宽;低速力矩大, 波动小,运行平稳;低噪音,高效率;后端编码器反馈构成直流伺服等优点等。
3)齿轮的设计:查阅相关的机械设计手册,选择合适的减速比、按照受力分析得到的数据设计以满足设计要求。
今年我校机器人大量采用了以往我校机器人控制技术中未曾使用的先进技术,这些主要技术的攻克将为我校大学生创新教育与教师的部分科研创造良好的技术条件,包括数控系统、自动机械、太阳能系统等都可以应用这些技术,所以有着广阔的发展前景。
2 比赛规则简介
[资料来源:http://doc163.com]
目 录
摘要 1
[来源:http://www.doc163.com]
关键词 1
1 前言 2
1.1 设计的研究内容与意义 3
2 比赛规则简介 3
2.1 场地图简介 4
2.2 水灯的规格和其他大赛工具 5
3 手动机器人机械总体方案的设计 7
3.1 机械总体方案的设计 7
3.2 轮子和底盘的选择与设计 7
3.3 升降机构的设计 11
3.4 端香盆机构的设计 14
3.5 夹取机构设计 15
3.6 齿轮设计 17
4 电机的选择 19
4.1电机选样 19
4.2 执行部分电机 21
4.3 机械手舵机的选择 22
5 总结 22
参考文献 23
致 谢 24
[资料来源:Doc163.com]
附录 24
[资料来源:www.doc163.com]
上一篇:青饲料切割机的设计(农业机械)(含CAD零件图和装配图)