
磁悬浮轴承系统控制策略分析
资料介绍:
磁悬浮轴承系统控制策略分析(任务书,开题报告,外文翻译,论文23000字)
摘 要
磁悬浮轴承是一种利用可控电磁力使轴稳定悬浮起来的高性能新型轴承,与传统轴承相比,具有无机械摩擦、无需润滑、转速高、无污染、功耗低和寿命长等优点,在能源、交通、超高速超精密加工、航空航天、机器人等领域有着广泛的应用前景。因此,磁悬浮轴承的研究是国内外的热点,磁力轴承的研究具有重大意义。
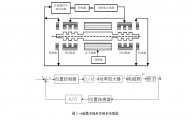
建立磁轴承的数学模型后可以看出,磁悬浮轴承系统是一个开环不稳定的系统,因此要想使转子稳定悬浮,系统必须设置反馈作用。系统需在控制器的协助下才能正常工作。因此,控制器的设计对于研究和其在工业中的应用是极为关键的一环。
本文主要研究主动磁悬浮轴承的控制策略,并至少详细介绍两种控制方法,它们分别是PID控制、模糊控制。PID是以磁力轴承的线性化后的模型为基础而设置的,在分析PID控制器参数对控制系统性能影响的基础上,提出了采用变参数PID控制器对磁悬浮轴承进行控制的策略。而针对主动磁悬浮轴承系统非线、难以建立精确数学模型的特性,所以本论文中又提出了模糊控制。模糊控制不依赖于对象的精确数学模型,对于那些非线性及输入和操作描述存在着不确定性的系统,具有动态性能好、受系统参数变化影响小的优点。
[资料来源:http://doc163.com]
在论文中还运用MATLAB建立了轴承的控制模型,并进行了MATALAB仿真。仿真结果表明,文中提出的控制方法对于主动磁轴承来说,都能得到不错的控制效果。文章的最后,对所提出的控制策略进行了一个总结,分析指出了各种方法的优缺点。
关键词:磁悬浮轴承 控制策略 数学模型 PID控制 模糊控制 MATLAB
Analysis of the control strategies about magnetic bearing
Abstract
Magnetic bearing is a new type of high performance bearing which use controllable electromagnetic force, so that the axis can be remained suspended, compared with the traditional bearing, it has many advantages, such as no mechanical friction, no need of lubrication, high speed, no pollution, low power consumption and longer life. Because of these brilliant characteristics, it has a broad application and great prospect in energy, transportation, super high speed and ultra-precision machining, aerospace, robotics and other fields. Therefore, analysis on the magnetic bearing is a hot topic and with great significance.
It’s easy for us to find that the magnetic bearing system is an open-loop and unstable system after its mathematic model is eatablished.So inorder to keep the rotor’s round suspention, feedback effect must be set.Besides, the system needs the assistance of the controller to work properly. Therefore, the controller design is a key both in research and industrial applications.
[版权所有:http://DOC163.com]
This paper mainly studies the control strategy of active magnetic bearing(AMB), and at least two kinds of control methods are introduced in detail, they are PID control and fuzzy control. PID control is based on the linearization model of magnetic bearings.In this paper, how the parameters of the PID controller effect the whole systerm’s performance is described. Based on this, the study proposes a variable parameters PID controller. And for non-linear active magnetic bearing system, it is difficult to establish a precise mathematical model, so this paper also proposed a fuzzy control. Fuzzy control don't need the precise mathematical model of the system, to non-linear system or the system that have uncertain description in the input or operating, which have good performance in dynamic speciality and good adaptability.
In this paper, MATLAB is used to set up the bearing’s model, and the controller systerm is simulated with the SIMULINK of MATALAB,the experiment got satisfied result for each method.At last, the summary and the analysis of the advantages and disadvantages of each method is given.
[资料来源:http://www.doc163.com]
Keywords: magnetic bearings; control strategy; mathematical model; PID control; fuzzy control; MATLAB
[资料来源:http://www.doc163.com]


目 录
摘 要 II
Abstract III
目 录 IV
第一章 绪论 1
1.1磁轴承的发展历史 1
1.2磁悬浮轴承技术的原理 2
1.3磁悬浮轴承的分类 4
1.4主动磁悬浮轴承的特性 5
1.5磁悬浮轴承的研究和应用现状 5
1.6课题研究的内容和章节安排 7
第二章 主动磁悬浮轴承系统的数学模型 8
2.1电磁力的推导及其线性化 8
[资料来源:http://www.doc163.com]
2.1.1电磁场 8
2.1.2电磁力 10
2.2主动磁悬浮轴承转子的运动方程 12
2.3本章小结 13
第三章 主动磁悬浮轴承的控制 14
3.1磁悬浮轴承的控制简介 14
3.1.1磁悬浮轴承的控制系统 14
3.1.2磁悬浮轴承的控制理论 14
3.2 PID控制 15
3.2.1磁悬浮轴承闭环系统的动态结构图 15
3.2.2基本控制规律 16
3.2.3磁悬浮轴承控制器的参数选择 17
3.2.4变参数PID控制器分析 19
3.3磁悬浮轴承的模糊控制 22
3.3.1模糊控制解决的问题 22
3.3.2模糊控制的特点 23
3.3.3经典集合和模糊集合的概念 23
3.3.4 模糊集合的数学表示方法 25
3.3.5模糊控制器的设计 25
3.3.6磁悬浮轴承的模糊控制系统 32 [资料来源:Doc163.com]
第四章 主动磁悬浮轴承控制策略的MATLAB分析 34
4.1 MATLAB/SIMULINK简介 34
4.2 PID控制算法的仿真 34
4.3模糊控制算法的仿真 36
4.4两种控制方法比较 37
4.5 本章小结 38
第五章 总结与展望 39
5.1本章小结 39
5.2展望 39
参考文献 40
致谢 42
[来源:http://Doc163.com]