
基于STM32的多足轮式机器人控制系统设计

基于STM32的多足轮式机器人控制系统设计(任务书,开题报告,外文翻译,论文14300字)
摘要
随着科学的进步和人类社会的发展,移动机器人在现代机器人中的地位日益得到彰显,移动机器人产业飞速发展,移动机器人的研发和设计也越来越受到重视。本文的目的是通过以STM32F1为控制核心,设计出多足轮式移动机器人的运动控制系统。
首先,通过研究分析移动机器人的发展历程和未来的发展方向,确定多足轮式机器人的基本结构,并分析其所要实现的具体功能。
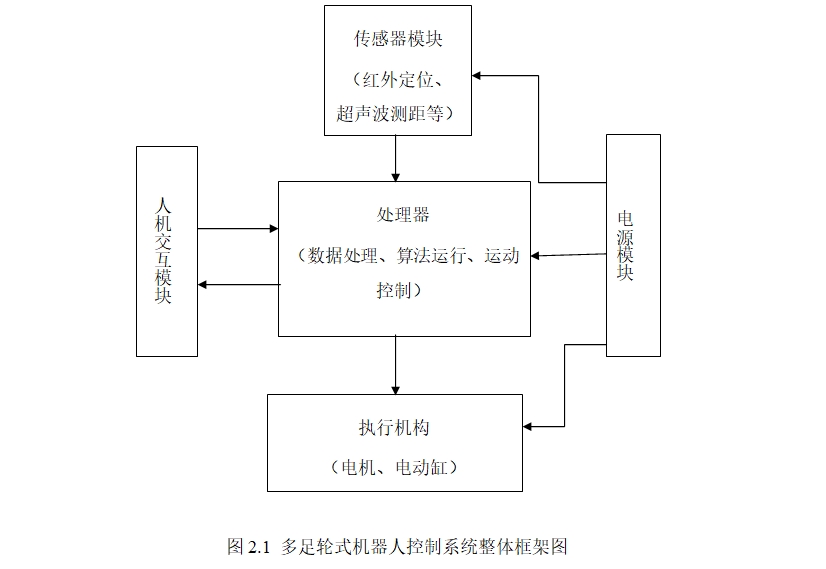
然后,根据多足轮式机器人的性能要求和工作原理,确定运动控制方法,设计出控制系统的基本结构。选择合适的系统器件,设计出红外探测模块、超声波测距模块、光电编码测速模块、电源模块、控制器模块等系统组成模块,设计出相应的硬件电路。
最后,依据机器人的运动控制方案,进行控制系统的软件设计。研究分析多足轮式机器人在水平面、斜面等不同路况下的运动系统控制,以及实现循迹、安全制动等常用功能的具体流程。
本文的多足轮式机器人主要具有以下功能:在水平地面的前进、后退和转向,斜面运动时平台保持水平,越障如一定高度的楼梯,循迹和安全制动等。
关键字:STM32F1、机器人、控制系统 [资料来源:http://doc163.com]
Abstract
With the progress of science and the human society, the status of mobile robot in modern robot is more and more important increasingly, and the industry of mobile robot develop rapidly, the research and design of mobile robot is also attracting more and more attention. The purpose of this paper is designing the control system of the multi-wheel robot with the STM32F1 as the control core.
Firstly, with analyzing the history and the development direction of mobile robot, we determine the basic structure of the wheeled robot, and analysis its specific functions.
Then, according to the requirements of the multi-wheel robot performance and the principle of motion control, we have designed the basic structure of the control system. We choose the appropriate devices of system to design the infrared detection module, ultrasonic distance measuring module, photoelectric coding speed measuring module, power supply module, controller module system and so on, and design the corresponding circuits.
[资料来源:www.doc163.com]
Finally, on the basis of the control scheme, we finish software design of control system. We study the control scheme of this robot, when it is running on the different road conditions such as the horizontal and cant, and finish the specific processes of common functions such as tracking and safety brake.
In this paper, the foot wheel robot mainly has the following functions: forward, backward and steering on level ground, keeping platform level on the cant motion, surmounting obstacles such as stairs with a certain height , tracking and safety brake, etc.
Keywords: STM32F1, Robot, The control system
[资料来源:https://www.doc163.com]

目录
摘要 I
Abstract II
第1章 绪论 1
1.1 课题研究的背景与意义 1
1.2 移动机器人发展历程及国内外研究现状 3
1.3 课题研究的主要内容 4
第2章 多足轮式机器人控制系统总体设计 6
2.1 多足轮式机器人的功能要求 6
2.2 多足轮式机器人系统设计方案 7
2.3 系统器件选型 8
2.3.1 处理器选型 8
2.3.2 执行机构选型 9
2.3.3 红外传感器选型 9
2.3.4 超声波测距传感器选型 10
2.3.5 陀螺仪传感器选型 11
2.3.6 光电编码器选型 11
2.3.7 遥控器选型 12
2.3.8 电源选型 12
第3章 控制系统硬件设计 13
3.1 单片机电路 13
3.1.1 MCU电路 13
3.1.2 启动端口电路 14
3.1.3 JTAG接口 15
3.2 传感器接口电路 15
3.2.1 红外传感器电路 15
3.2.2 超声波传感器接口电路 16
3.2.3 陀螺仪传感器接口电路 17
3.3 电机驱动电路 18
3.4 通信接口电路 20
3.4.1 RS232接口电路 20
3.4.2 RS485接口电路 20
3.4.3 CAN总线接口电路 21
3.5 检测电路和保护电路 21 [资料来源:www.doc163.com]
3.6 供电电路 22
第4章 控制系统软件设计 24
4.1 系统主程序设计 24
4.3 不同运动形式的控制程序设计 25
4.3.1 水平路况 25
4.3.2 斜坡路况 26
4.4 多足轮式机器人常用功能分析设计 28
4.4.1 安全制动功能 28
4.4.2循迹功能 28
第5章 总结与展望 30
5.1 总结 30
5.2 展望 30
致谢 31
参考文献 32